ROS2入门指南:安装与教程
需积分: 10 136 浏览量
更新于2024-07-06
收藏 1016KB PDF 举报
"这是一份关于ROS2的综合学习资料,适合初学者,包含了从基础知识到高级主题的全面介绍。内容涵盖了ROS2的引言、安装教程、基本概念、DDS和ROS中间件实现、客户端程序库、接口设置、服务质量、自定义软件包构建、命令行工具使用、多RMW实现、进程中的多节点使用、自定义接口定义以及高级话题如自定义内存分配器等。资料还提供了Linux和Windows下的安装步骤,包括设置软件源、安装依赖、环境变量配置等。"
ROS2是Robot Operating System(机器人操作系统)的一个新版本,相比旧版有更强的稳定性、更丰富的功能,更适合工业应用场景。ROS2引入了许多改进,例如使用DDS(Data Distribution Service)作为默认的中间件,以提供更高效、可靠的数据通信。
在Linux环境下安装ROS2,通常通过Debian包进行。首先需要设置软件源,添加ROS2的gpg密钥并更新软件包列表,然后安装所需的ROS2软件包。此外,还需要设置环境变量,并根据需求选择合适的RMW(Real-Time Messaging Middleware)实现。对于依赖于ROS1的软件包,也需要特别处理。
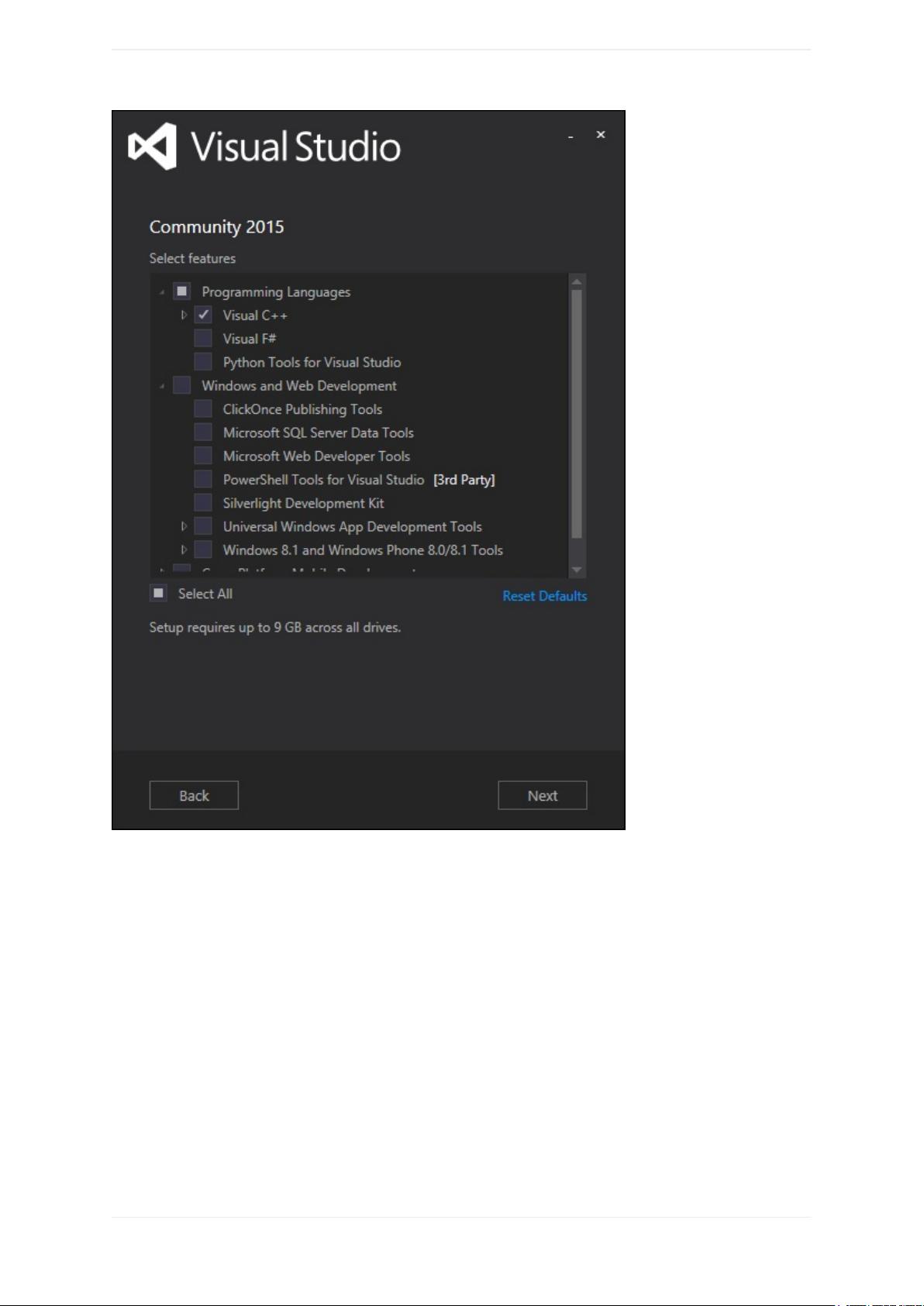
在Windows系统中,安装过程包括满足系统要求、安装必要的依赖(如Chocolatey、Python、Visual Studio Community 2015)、DDS程序、OpenCV等,之后下载ROS2并设置环境。安装完成后,可以通过运行简单的示例程序来验证安装是否成功。
ROS2的基本概念包括它的客户端程序库、接口以及服务质量设置。ROS2客户端库提供了一系列API,用于开发ROS2应用程序。ROS的接口包括消息和服务,开发者可以定义自定义的消息类型和服务,以满足特定项目的需求。ROS2的接口相比于ROS1有新特性,如增强的数据类型和更好的数据完整性。
在进阶部分,资料可能探讨了如何自定义内存分配器,这允许开发者优化系统的内存使用,特别是在资源受限的环境中。此外,资料还可能涉及如何在一个进程中运行多个ROS2节点,以及如何使用多种RMW实现来提升系统兼容性和性能。
这份资源为学习和理解ROS2提供了全面的指导,从基础安装到高级开发技巧,覆盖了ROS2生态系统的多个方面。无论是对ROS初学者还是希望深入ROS2的开发者来说,都是一份宝贵的参考资料。
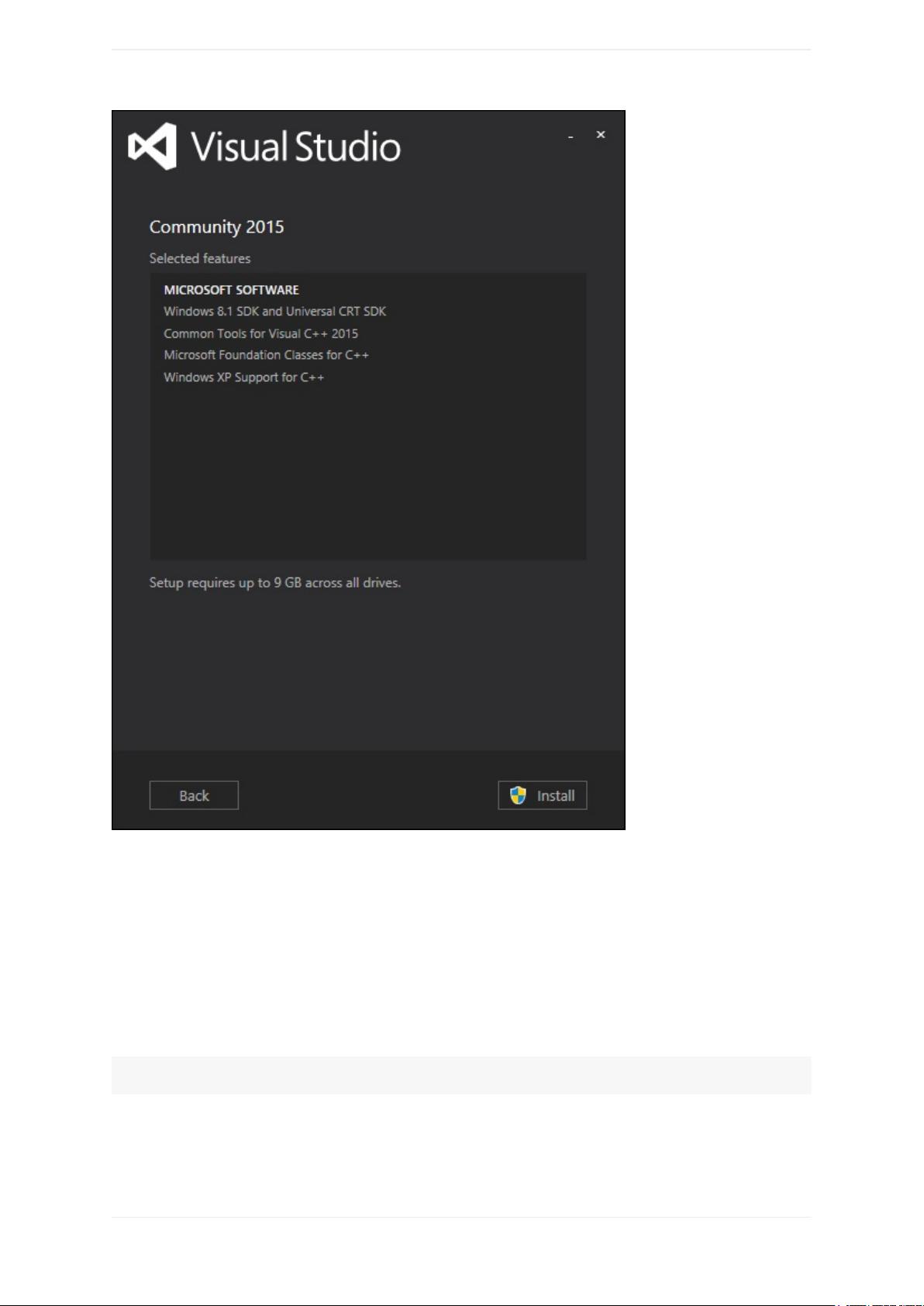
再次确认已经选择上了对应的功能
安装
7
剩余39页未读,继续阅读
396 浏览量
2021-10-06 上传
2021-10-01 上传
2020-07-23 上传
2021-11-06 上传
2020-07-07 上传
2021-07-16 上传
2024-07-18 上传
2022-11-03 上传

敢敢のwings
- 粉丝: 5w+
- 资源: 9
 我的内容管理
展开
我的内容管理
展开







