CAN总线基础知识入门指南
需积分: 3 6 浏览量
更新于2024-08-01
收藏 1.92MB PDF 举报
"CAN总线入门知识"
CAN总线(Controller Area Network)是一种串行通信协议,主要用于汽车电子系统之间的通信,但也在其他工业自动化、航空航天、医疗设备和物联网等领域广泛应用。该技术由德国博世公司于1986年开发,并在后续年份通过ISO11898和ISO11519标准进行了国际标准化。
1. **CAN的应用示例**
CAN总线主要应用于需要高效、可靠和实时通信的环境。在汽车领域,它用于发动机管理系统、防抱死刹车系统(ABS)、气囊控制、灯光控制、车载信息娱乐系统等。此外,它还在工厂自动化中的机器人控制、楼宇自动化、医疗设备如监护仪和麻醉机,以及分布式传感器和执行器网络中发挥作用。
2. **总线拓扑**
CAN总线通常采用总线型拓扑结构,如树形、线形或星形。节点(即设备)通过终端电阻连接到总线上,可以双向通信,允许多个节点同时发送数据,通过仲裁机制决定哪个节点的优先级更高。
3. **CAN的特点**
- **错误检测和恢复能力**:CAN协议包含强大的错误检测机制,包括位错误、帧错误和CRC校验,能确保数据的准确性。
- **优先级仲裁**:基于标识符(ID)的非破坏性仲裁,高优先级的节点可以在低优先级节点传输期间插入数据。
- **位填充**:为了防止连续相同的位序列导致的同步问题,协议规定每连续五个相同位后自动插入一个反相位。
- **灵活的数据长度**:CAN支持不同长度的数据帧(0-8字节)和远程帧(用于请求数据)。
- **容错能力**:当节点检测到错误时,可以进入不同的错误状态,如主动错误和被动错误,有助于系统诊断和恢复。
4. **CAN协议的基本概念**
- **帧的种类**:包括数据帧、遥控帧、错误帧、过载帧和帧间隔。
- **数据帧和遥控帧**:数据帧用于传输实际数据,遥控帧则用于请求特定节点的数据。
- **错误帧**:当检测到错误时,节点会发送错误帧,通知其他节点存在通信问题。
- **位时序**:定义了CAN信号的上升沿和下降沿,影响通信速度和抗干扰能力。
- **同步和再同步**:保持所有节点的时钟同步,确保正确接收和发送数据。
5. **标准规格**
ISO11898和ISO11519-2是两个主要的CAN标准。ISO11898主要定义物理层和数据链路层的规范,而ISO11519-2针对车载应用提供更具体的接口和协议要求。
CAN总线因其高效、可靠和灵活的特性,成为许多领域首选的通信协议。了解和掌握CAN总线的基础知识对于进行嵌入式系统设计和维护至关重要。
应用手册
RCJ05B0027-0100/Rev.1.00 2006.02 Page 8 of 48
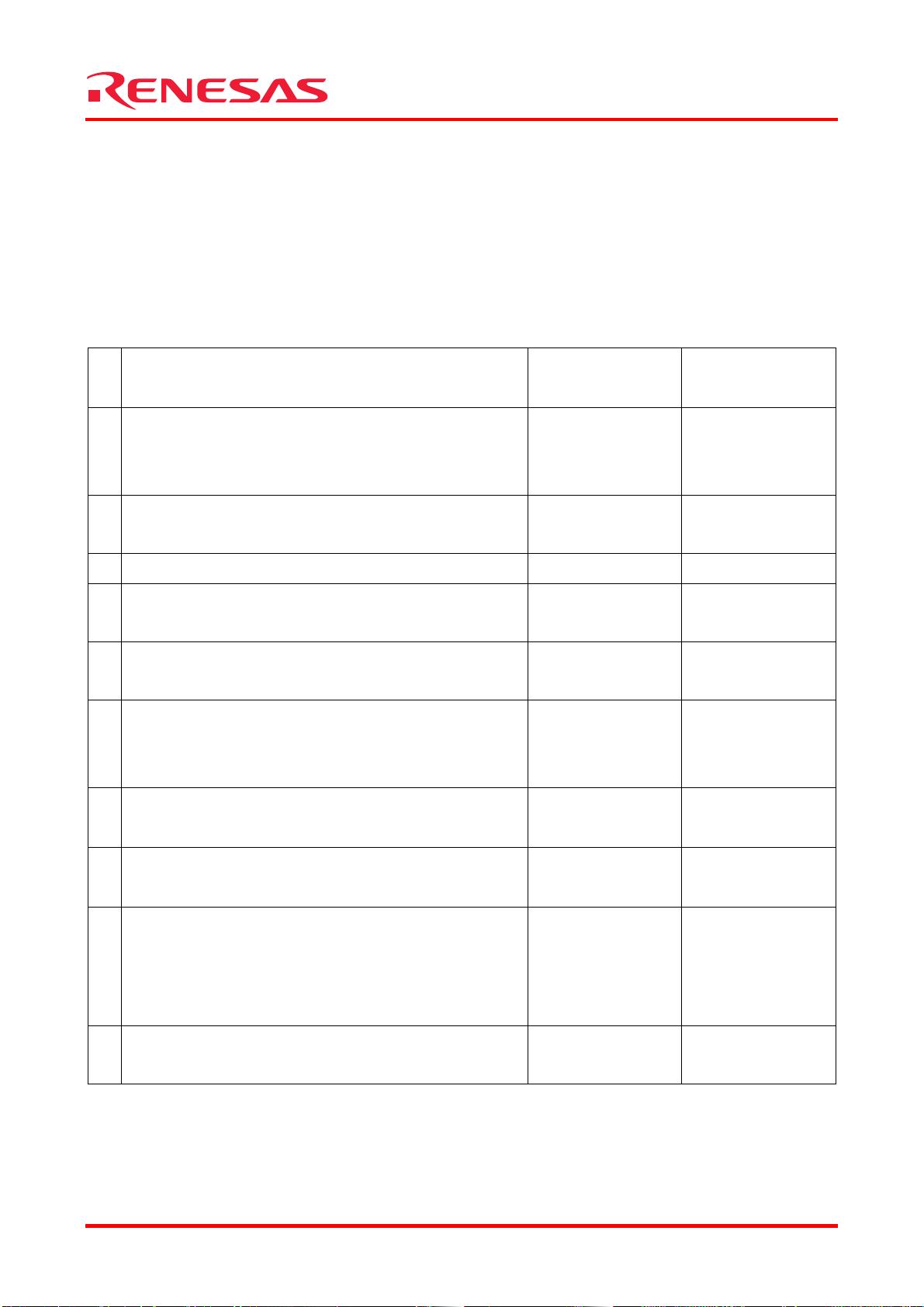
5.2 错误计数值
发送错误计数值和接收错误计数值根据一定的条件发生变化。
错误计数值的变动条件如表 2 所示。
一次数据的接收和发送可能同时满足多个条件。
错误计数器在错误标志的第一个位出现的时间点上开始计数。
表 2. 错误计数值的变动条件
接受和发送错误计数值的变动条件 发送错误计数值
(TEC)
接收错误计数值
(REC)
1 接收单元检测出错误时。
例外:接收单元在发送错误标志或过载标志中检测出“位
错误”时,接收错误计数值不增加。
+1
2 接收单元在发送完错误标志后检测到的第一个位为显性电
平时。
+8
3 发送单元在输出错误标志时。 +8
4 发送单元在发送主动错误标志或过载标志时,检测出位错
误。
+8
5 接收单元在发送主动错误标志或过载标志时,检测出位错
误。
+8
6 各单元从主动错误标志、过载标志的最开始检测出连续 14
个位的显性位时。
之后,每检测出连续的 8 个位的显性位时。
发送时
+8
接收时
+8
7 检测出在被动错误标志后追加的连续 8 个位的显性位时。 发送时
+8
接收时
+8
8 发送单元正常发送数据结束时(返回 ACK 且到帧结束也未
检测出错误时)。
−1
TEC=0 时±0
9 接收单元正常接收数据结束时(到 CRC 未检测出错误且正
常返回 ACK 时)。
1≤REC≤127 时-1
REC=0 时±0
REC>127 时
设 REC=127
10 处于总线关闭态的单元,检测到 128 次连续 11 个位的隐
性位。
TEC=0
REC=0

剩余48页未读,继续阅读
282 浏览量
2021-10-04 上传
2010-08-14 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

陶陶的爸爸
- 粉丝: 5
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 开源通讯录备份系统项目,易于复刻与扩展
- 探索NX二次开发:UF_DRF_ask_id_symbol_geometry函数详解
- Vuex使用教程:详细资料包解析与实践
- 汉印A300蓝牙打印机安卓App开发教程与资源
- kkFileView 4.4.0-beta版:Windows下的解压缩文件预览器
- ChatGPT对战Bard:一场AI的深度测评与比较
- 稳定版MySQL连接Java的驱动包MySQL Connector/J 5.1.38发布
- Zabbix监控系统离线安装包下载指南
- JavaScript Promise代码解析与应用
- 基于JAVA和SQL的离散数学题库管理系统开发与应用
- 竞赛项目申报系统:SpringBoot与Vue.js结合毕业设计
- JAVA+SQL打造离散数学题库管理系统:源代码与文档全览
- C#代码实现装箱与转换的详细解析
- 利用ChatGPT深入了解行业的快速方法论
- C语言链表操作实战解析与代码示例
- 大学生选修选课系统设计与实现:源码及数据库架构
