深度残差输出层优化神经语言生成
需积分: 0 93 浏览量
更新于2024-08-05
收藏 381KB PDF 举报
"本文探讨了深度残差输出层在神经语言生成中的应用,旨在改进模型结构,特别是对于大型且稀疏的输出标签空间的学习。作者Nikolaos Pappas和James Henderson提出了一种深度残差输出映射,通过在层间引入Dropout来更好地捕捉输出空间的结构并防止过拟合。实验结果显示,这种方法可以与最先进的循环和自注意力架构相媲美或超越,表明分类器不一定要有高秩,只要能更好地捕获输出空间结构,就能更好地建模自然语言。"
深度残差网络(Residual Networks)在计算机视觉领域取得了显著的成功,其核心思想是通过短路机制解决梯度消失和深度网络训练的困难。在本文中,这个概念被扩展到神经语言生成任务,特别是在处理大规模且稀疏的输出标签空间时。传统的神经语言模型通常在分类器权重中间接捕获输出空间结构,但这种方式往往缺乏参数共享,容易导致过拟合。
为了解决这个问题,作者提出了深度残差输出层(Deep Residual Output Layers)。这种结构引入了共享的输出标签映射,增强了模型表达力,同时在层间应用Dropout策略以减少过拟合风险。Dropout是一种正则化技术,通过在训练过程中随机丢弃一部分神经元,强制网络学习更鲁棒的特征表示,从而提高泛化能力。
实验部分,研究者在三个语言生成任务上验证了他们的方法:这些任务可能包括机器翻译、文本摘要或者对话生成等。结果显示,提出的深度残差输出映射不仅与当前最佳的循环神经网络(RNNs)和自注意力架构(如Transformer)表现相当,甚至在某些情况下有所超越。这表明,即使分类器的秩不高,只要能够更有效地捕获输出空间的结构,就能在自然语言建模中取得优异的效果。
该研究揭示了在神经语言生成中,通过改进输出层的结构,特别是采用深度残差和Dropout相结合的方式,可以提高模型对复杂输出空间结构的理解,并提升生成质量。这一发现为优化神经语言模型提供了新的视角,对于未来自然语言处理领域的研究具有重要的指导意义。
Deep Residual Output Layers for Neural Language Generation
discussed so far, assuming a fixed |V|, d, d
h
:
C
tied
< C
bilinear
≤ C
dual
≤ C
base
, (6)
where
C
tied
,
C
base
,
C
bilinear
and
C
dual
respectively corre-
spond to the number of dedicated parameters of an output
layer with (Eq. 2) and without (Eq. 1) weight tying, using
the bilinear mapping (Eq. 3) and the dual nonlinear mapping
(Eq. 5) which are assumed to be nonzero except C
tied
.
Given this analysis, we identify and aim to address the
following limitations of the previously proposed output layer
parameterisations for language generation:
(a)
Shallow modeling of the label space. Output labels
are mapped into the joint space with a single (possibly
nonlinear) projection. Its power can only be increased
by increasing the dimensionality of the joint space.
(b)
Tendency to overfit. Increasing the dimensionality of
the joint space and thus the power of the output classi-
fier can lead to undesirable effects such as overfitting
in certain language generation tasks, which limits its
applicability to arbitrary domains.
3. Deep Residual Output Layers
To address the aforementioned limitations we propose a
deep residual output layer architecture for neural language
generation which performs deep modeling of the structure
of the output space while it preserves acquired information
and avoids overfitting. Our formulation adopts the gen-
eral form and the basic principles of previous output layer
parametrizations which aim to capture the output structure
explicitly in Section 2.3, namely (i) learning rich output
structure, (ii) controlling the output layer capacity indepen-
dently of the dimensionality of the vocabulary, the encoder
and the word embedding, and, lastly, (iii) avoiding costly
label-set-size dependent parameterisations.
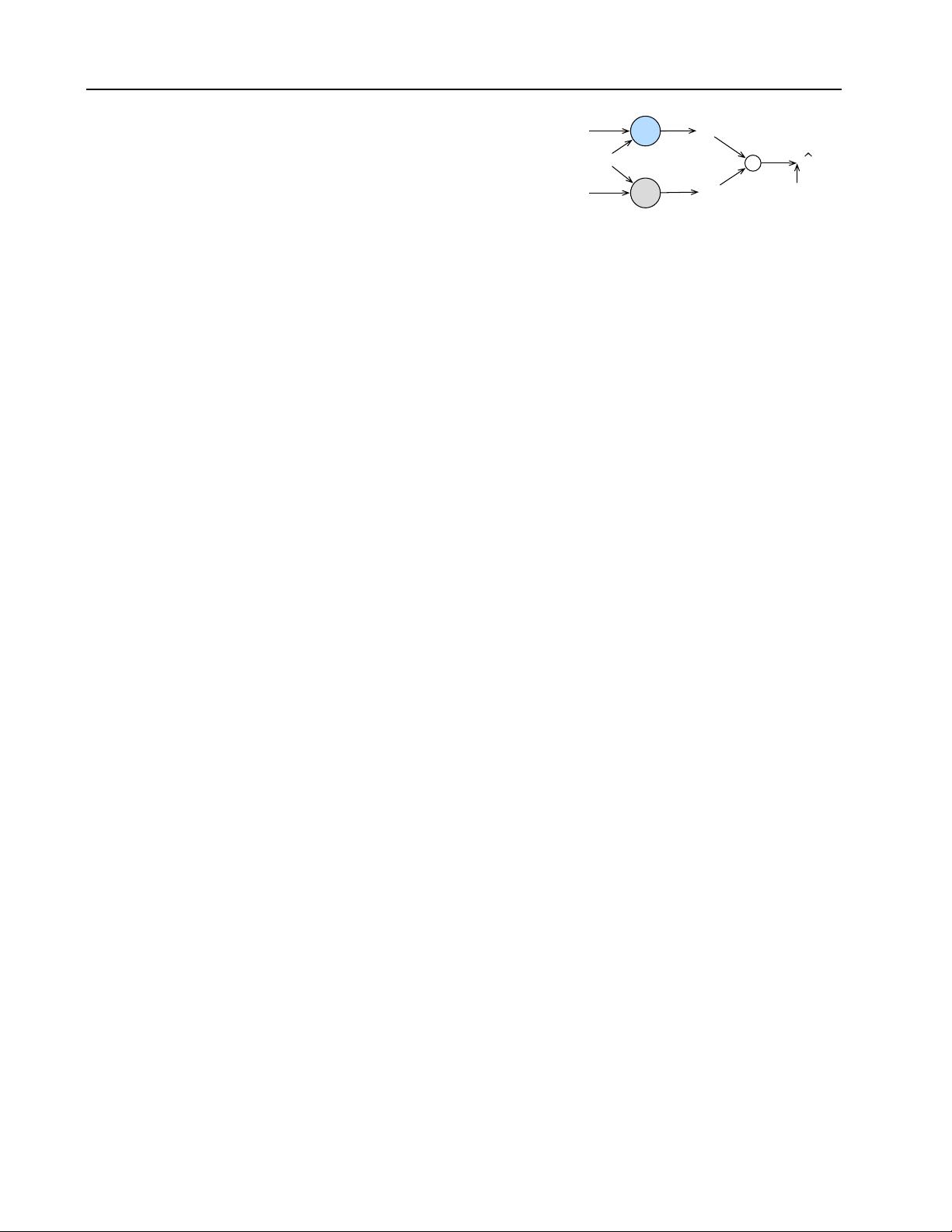
3.1. Overview
A general overview of the proposed architecture for neural
language generation is displayed in Fig. 1. We base our
output layer formulation starting on the general form of the
dual nonlinear mapping of Eq. 4:
p(y
t
|y
t−1
1
) ∝ exp
g
out
(E)g
in
(h
t
) + b
. (7)
The input network
g
in
(·)
takes as input a sequence of words
represented by their input word embeddings
E
which have
been encoded in a context representation
h
t
for the given
time step
t
. The output or label network
g
out
(·)
takes as
input the word(s) describing each possible output label and
encodes them in a label embedding
E
(k)
where
k
is the
depth of the label encoder network. Next, we define these
two proposed networks, and then we discuss how the model
is trained and how it relates to previous output layers.
g
out
E
g
in
w
1
, w
2
, …, w
T
w
1
, w
2
, …, w
|V|
E
h
t
(k)
b
y
.
Input text
Output text
Figure 1. General overview of the proposed architecture.
3.2. Label Encoder Network
For language generation tasks, the output labels are each a
word in the vocabulary
V
. We assume that these labels are
represented with their associated word embedding, which is
a row in
E
. In general, there may be additional information
about each label, such as dictionary entries, cross-lingual
resources, or contextual information, in which case we can
add an initial encoder for these descriptions which outputs
a label embedding matrix
E
0
∈ IR
|V|×d
. In this paper we
make the simplifying assumption that
E
0
= E
and leave the
investigation of additional label information to future work.
3.2.1. LEARNING OUTPUT STRUCTURE
To obtain a label representation which is able to encode rich
output space structure, we define the
g
out
(·)
function to be
a deep neural network with
k
layers which takes the label
embedding
E
as input and outputs its deep label mapping
at the last layer, g
out
(E) = E
(k)
, as follows:
E
(k)
= f
(k)
out
(E
(k−1)
), (8)
where
k
is the depth of the network and each function
f
(i)
out
(·)
at the
i
th
layer is a nonlinear projection of the following
form:
f
(i)
out
(E
(i−1)
) = σ(E
(i−1)
U
(i)
+ b
(i)
u
), (9)
where
σ(·)
is a nonlinear activation function such as
ReLU
or
Tanh
, and the matrix
U
(i)
∈ IR
d×d
j
and the bias
b
(i)
u
∈
IR
d
j
are the linear projection of the encoded outputs at the
i
th
layer. Note that when we restrict the above label network
to have one layer depth the projection is equivalent to the
label mapping from previous work in Eq. 5.
3.2.2. PRESERVING INFORMATION
The multiple layers of projections in Eq. 8 force the relation-
ship between word embeddings
E
and label embeddings
E
(k)
to be highly nonlinear. To preserve useful informa-
tion from the original word embeddings and to facilitate
the learning of the label network we add a skip connection
directly to the input embedding. Optionally, for very deep
label networks, we also add a residual connection to previ-
ous layers as in (He et al., 2016). With these additions the
projection at the k
th
layer becomes:
E
(k)
= f
(k)
out
(E
(k−1)
) + E
(k−1)
+ E (10)
剩余11页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-05-09 上传
2019-11-28 上传
2016-11-20 上传
2020-06-19 上传
2022-04-24 上传
2019-04-23 上传

永远的12
- 粉丝: 934
- 资源: 320
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
