ROS机器人操作系统入门教程全解析
需积分: 40 56 浏览量
更新于2024-07-18
收藏 4.64MB PDF 举报
"ROS操作系统的入门资料,涵盖了从基础到高级的多个方面,包括ROS的简介、总体框架、新手教程、机器人仿真、模型创建、源码上传、键盘、操作杆和语音控制,以及机器视觉、坐标系统、导航与定位框架等关键概念。这份资料旨在帮助初学者理解和应用ROS在机器人研究中的作用,通过实际操作和案例来深化理解。"
ROS操作系统,全称Robot Operating System,是机器人领域广泛应用的一个开源平台。它的诞生源于2007年斯坦福大学人工智能实验室与Willow Garage公司的合作,后来由Willow Garage推动并发展,旨在解决机器人系统模块化和复用性的需求。ROS的核心理念是提供一个通用的框架,允许开发者轻松地构建、测试和部署各种机器人软件。
ROS的设计目标主要包括以下几点:
1. **硬件抽象**:ROS提供了一套接口,使得不同硬件平台的驱动程序可以被统一管理和使用,降低了开发者的硬件依赖。
2. **通信机制**:ROS的节点间通信机制,如消息传递(Message Passing),服务(Services)和参数服务器(Parameter Server),使得不同组件之间能高效协作。
3. **工具和库**:ROS包含了大量的工具和库,用于数据处理、视觉识别、路径规划等,方便开发者快速实现功能。
4. **包和工作空间**:ROS采用包(Package)组织代码,工作空间(Workspace)管理多个包,便于代码管理和版本控制。
ROS的总体框架包括多个层次,从底层的硬件接口到上层的应用软件。其中,`roscore`是ROS的核心,负责节点间的通信和参数服务器;`nodes`是执行特定任务的程序;`topics`是节点间通信的通道,用于发布和订阅消息;`services`允许节点间进行请求-响应式的交互;`parameters`提供了全局配置参数的共享。
资料中提到的智能车模型`smartcar`是一个实践案例,通过创建和仿真`smartcar`,学习者可以理解如何在ROS中定义机器人模型,如何进行仿真,并通过键盘、操作杆和语音控制来操控机器人。此外,ROS的机器视觉部分涉及到图像处理和目标识别,坐标系统解释了如何在ROS中定义和转换不同坐标系,而导航与定位框架如`move_base`和`amcl`则涉及路径规划和实时定位。
这份资源是ROS初学者的宝贵资料,它不仅介绍了ROS的基本概念,还通过一系列实际操作引导学习者掌握ROS的关键技术和应用,从而在机器人研究和开发中得心应手。

三、ROS 中的常用功能
ROS 中提供了很多强大的功能,我们学习完上面的基本知识之后要继续进行深入。
1、rviz
rviz 是 ROS 中一款强大的 3D 可视化工具,这个玩意在后面可是要频繁用到的,是必须
要弄明白的,详细的教程可以参考 wiki:
http://www.ros.org/wiki/rviz
我们可以在里面创建自己的机器人,并且让机器人动起来。还可以创建地图,显示 3D
点云等等,总之,想在 ROS 中显示的东东都可以在这里显示出来。当然这些显示都是通过消
息的订阅来完成的,机器人通过 ROS 发布数据,rviz 订阅消息接收数据,然后显示,这些
数据也是有一定的数据格式的,可以参考下面的链接:
http://www.ros.org/wiki/rviz/DisplayTypes
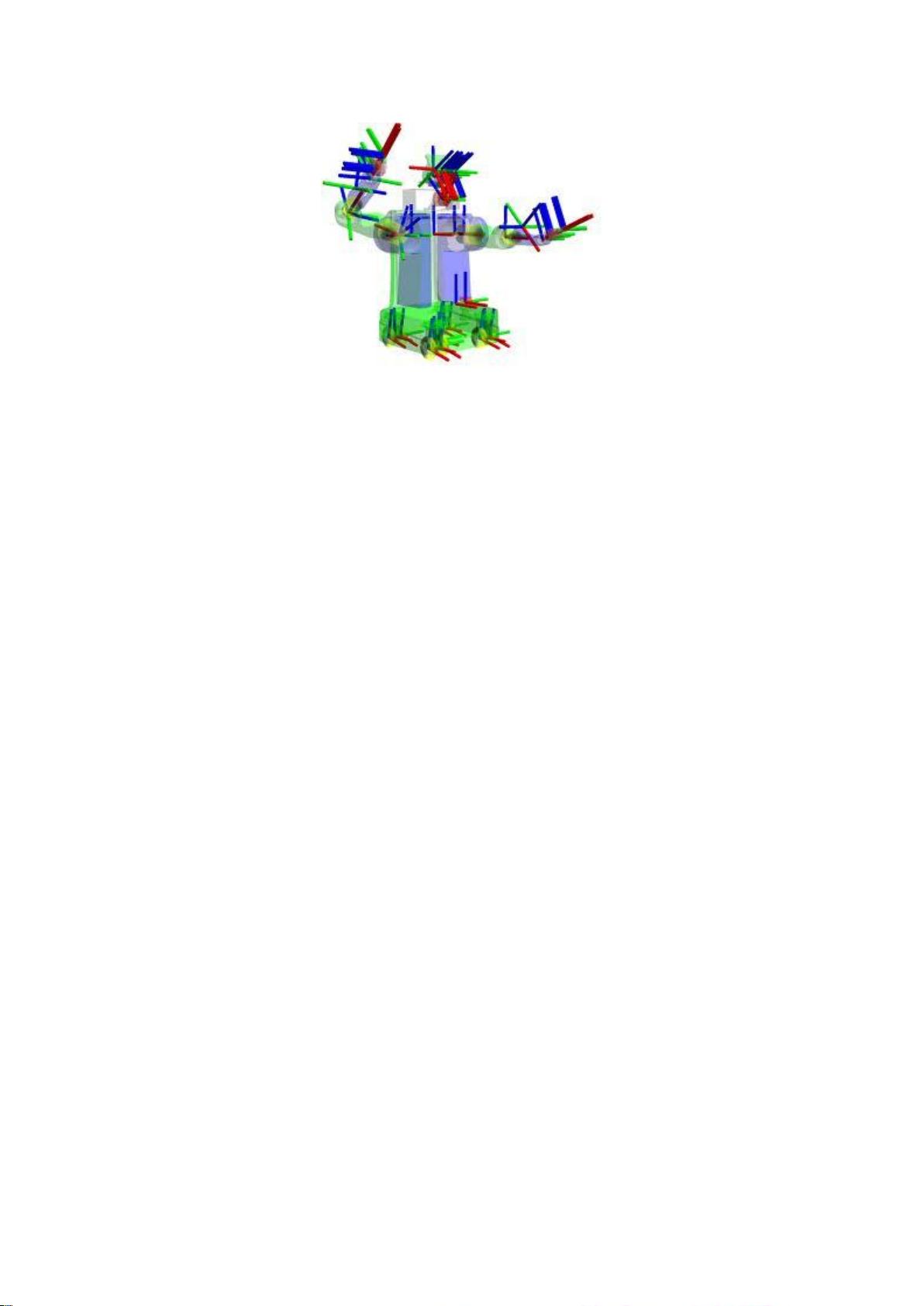
看到上面的机器人了吧,是不是很酷,在 rviz 中,这样的机器人模型是通过 urdf 文件
描述的,具体 urdf 文件怎么写,参考 wiki:
http://www.ros.org/wiki/urdf
2、tf
tf 是 ROS 中的坐标变换系统,在机器人的建模仿真中经常用到。


剩余122页未读,继续阅读
2019-02-24 上传
2015-10-09 上传
2023-09-02 上传
2023-10-03 上传
2023-08-23 上传
2023-05-03 上传
2023-10-22 上传
2023-06-22 上传

sinat_27018627
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
