全国大学生智能汽车竞赛电磁组直立行车设计指南
需积分: 36 116 浏览量
更新于2024-07-18
4
收藏 6.13MB PDF 举报
"第七届全国大学生‘飞思卡尔’杯智能汽车竞赛电磁组直立行车参考设计方案"
这个资源提供了关于电磁直立行车的详细设计方案,适用于第七届全国大学生“飞思卡尔”杯智能汽车竞赛。该方案由卓晴老师进行直立控制的讲解,旨在帮助参赛者理解和构建能够直立行走的电磁组车模。
一、直立控制是电磁组车模的核心挑战之一。通过分解任务,我们可以看到控制主要包括车模的直立保持、速度控制和方向控制。直立行走需要精确的倾角测量,以便实时调整车模姿态,保持稳定。
二、在原理篇中,2.1节解释了如何将直立行走任务分解为可操作的部分。2.2节详细讨论了车模直立控制机制,可能涉及陀螺仪或加速度传感器等倾角测量技术。2.3节则关注速度控制,这可能通过PID控制器或其他反馈控制策略实现,确保车模在行驶过程中的速度稳定。2.4节方向控制涉及转向机制,可能使用电磁感应或伺服电机来调整车模行驶方向。2.5节介绍了倾角测量方法,可能是利用传感器如MEMS传感器来获取数据。2.6节给出了整个直立行走控制算法的概览图,展示各个控制子系统的相互作用。
三、电路设计篇详细描述了硬件实现。3.1节展示了整体电路框图,包括微控制器(DSC)、传感器、电机驱动和其他组件的连接。3.2节介绍了DSC(数字信号控制器)及其最小系统,它是整个控制系统的大脑。3.3节讲述了倾角传感器的电路设计,3.4节涵盖了电机驱动电路,用于控制车模的前进和转向。3.5节提到了速度传感器的使用,用于实时监测车模速度。3.6节则详细阐述了电磁线检测电路,这是电磁组车模特有的部分,用于赛道导航。
四、机械设计篇4.1节探讨了车模的简化改装,以适应直立行走的需求。4.2节描述了传感器的安装位置和方式,而4.3节提出了设计和组装过程中需要注意的事项。
五、软件编写与调试篇5.1节明确了软件的功能和架构,5.2节涉及到DSC的资源配置。5.3节详述了主要算法及其在软件中的实现,包括控制算法和数据处理。5.4节提到了程序调试和参数整定的重要性,以及如何优化性能。5.5节介绍了现场运行测试的过程,确保车模在真实环境中能够稳定运行。
六、结束语总结了整个设计方案,并鼓励参赛者基于此参考设计进行创新和改进。
附录包含了更多的详细信息和技术资料,供参赛者深入研究和应用。
这个参考设计方案不仅提供了一个实际可行的电磁直立行车模型,还引导参赛者理解背后的控制理论和工程实践,有助于提升他们的技能和创新能力。
9
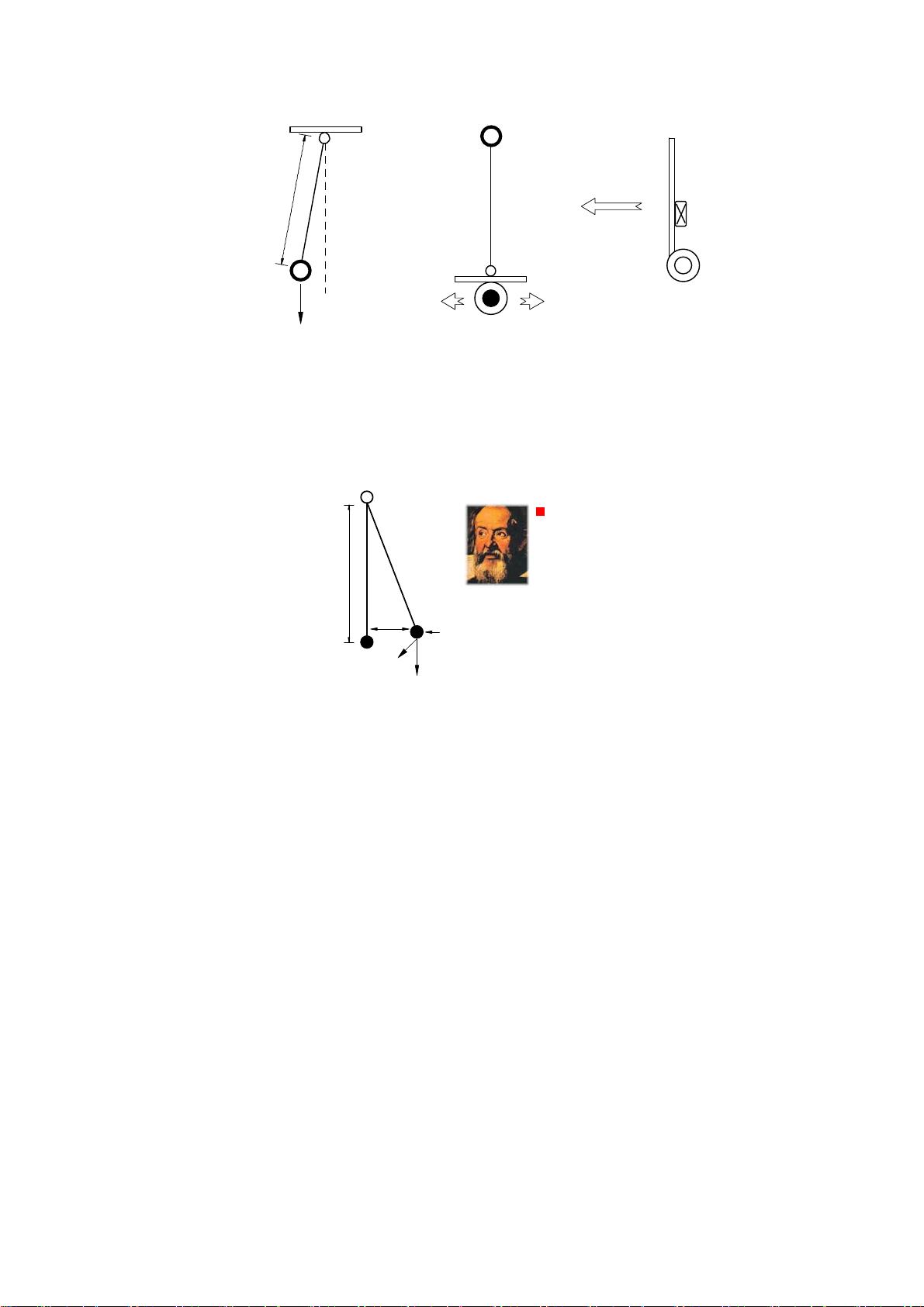
图 2.5 车模可以简化成倒立的单摆
普通的单摆受力分析如图 2.6 所示。
图 2.6 普通的单摆受力分析
当物体离开垂直的平衡位置之后,便会受到重力与悬线的作用合力,驱动重物回复
平衡位置。这个力称之为回复力,其大小为
sinFmg mg
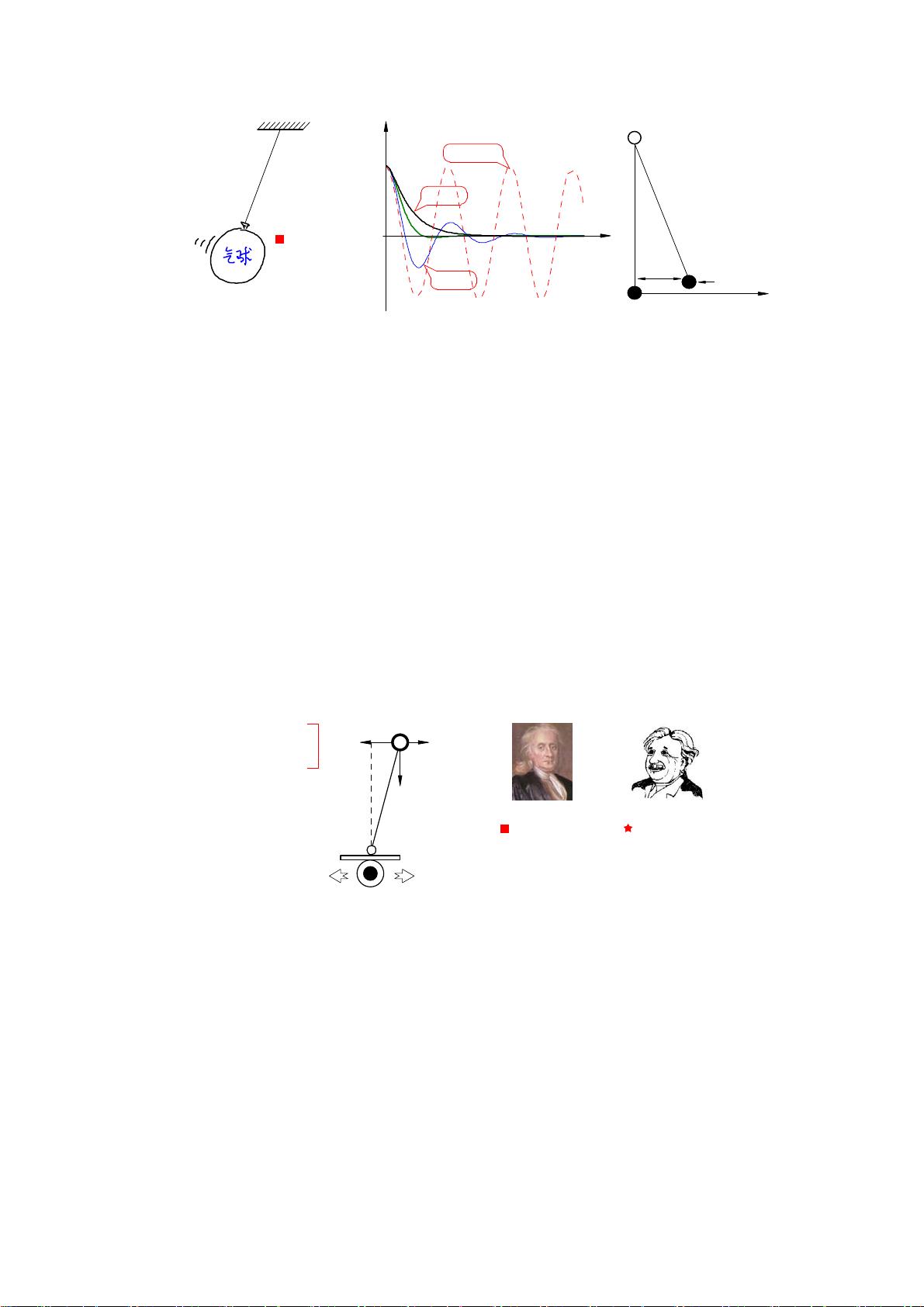
在此回复力作用下,单摆便进行周期运动。在空气中运动的单摆,由于受到空气的
阻尼力,单摆最终会停止在垂直平衡位置。空气的阻尼力与单摆运行速度成正比,方向
相反。阻尼力越大,单摆越会尽快在垂直位置稳定下来。图 2.7 显示出不同阻尼系数下,
单摆的运动曲线。
m
l
mg
θ
a
m
l
车模
简化
底部可以
运动的倒
立单摆
单摆模型
θ
l
sinθ
F=mg
l
质心
m
mgsinθ
伽利略
据说伽利略通
过观察吊灯的
摆动发现了单
摆运动的等时
性。
剩余48页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2019-11-29 上传
2012-12-28 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

HansXia
- 粉丝: 9
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







最新资源
- Raspberry Pi OpenCL驱动程序安装与QEMU仿真指南
- Apache RocketMQ Go客户端:全面支持与消息处理功能
- WStage平台:无线传感器网络阶段数据交互技术
- 基于Java SpringBoot和微信小程序的ssm智能仓储系统开发
- CorrectMe项目:自动更正与建议API的开发与应用
- IdeaBiz请求处理程序JAVA:自动化API调用与令牌管理
- 墨西哥面包店研讨会:介绍关键业绩指标(KPI)与评估标准
- 2014年Android音乐播放器源码学习分享
- CleverRecyclerView扩展库:滑动效果与特性增强
- 利用Python和SURF特征识别斑点猫图像
- Wurpr开源PHP MySQL包装器:安全易用且高效
- Scratch少儿编程:Kanon妹系闹钟音效素材包
- 食品分享社交应用的开发教程与功能介绍
- Cookies by lfj.io: 浏览数据智能管理与同步工具
- 掌握SSH框架与SpringMVC Hibernate集成教程
- C语言实现FFT算法及互相关性能优化指南
