理解与实现A*寻路算法:原理及Java代码示例
"A*寻路算法的Java代码实现与解析"
A*寻路算法是一种广泛应用在游戏开发、路径规划和地图导航中的高效寻路算法。它结合了Dijkstra算法的全局最优性和Greedy Best-First Search的局部最优性,通过引入启发式函数来指导搜索,以更快地找到从起点到终点的最短路径。
A*算法的核心在于以下几个关键概念:
1. **状态空间**:寻路问题通常是在一个图或网格中进行,状态空间由所有可能的节点(或位置)组成,节点之间通过边相连,表示可以移动的关系。
2. **节点**:在二维网格中,节点通常代表网格的每个小格子,它们可以是可通行或障碍物。节点之间有连接表示可以移动的路径。
3. **代价函数**:每个节点都有一个从起点到该节点的代价,表示移动到该点所需的代价。在A*算法中,这个代价通常包括两部分:从起点到当前节点的实际代价(g值)和预测从当前节点到目标节点的估计代价(h值)。
4. **启发式函数**:h值是由启发式函数计算得出的,它给出从当前节点到目标节点的最佳估计代价,常用的启发式函数有曼哈顿距离和欧几里得距离。启发式函数必须是无偏的,即对于所有节点,其实际代价永远不会超过启发式函数的预测值。
5. **优先队列**:A*算法使用优先队列(通常是二叉堆)来存储待探索的节点,根据f值(f = g + h)排序,f值越小的节点优先级越高。
6. **扩展节点**:每次从优先队列中取出f值最小的节点进行扩展,检查其相邻节点,并更新它们的g值和f值,将满足条件的相邻节点加入队列。
7. **路径找到**:当目标节点被扩展时,路径找到,回溯路径上的节点即可得到从起点到目标的最短路径。
在Java中实现A*算法,你需要定义以下组件:
- `Node`类:表示网格中的节点,包含位置信息、g值、h值和f值,以及指向父节点的引用。
- `Grid`类:表示整个搜索区域,存储节点并提供邻居节点的访问方法。
- `AStar`类:实现A*算法,包括初始化优先队列、计算启发式函数、扩展节点和回溯路径等功能。
代码示例通常包括以下步骤:
1. 初始化搜索区域(网格),创建节点并设置障碍物。
2. 对起点和目标节点计算g值和h值。
3. 创建优先队列,将起点插入队列。
4. 当队列非空时,重复扩展节点、更新相邻节点的过程,直到目标节点被扩展或队列为空。
5. 回溯找到的路径,从目标节点到起点,构建最终路径。
提供的Java代码样例会详细展示如何实现这些步骤,同时包括C++和Blitz Basic版本的示例程序,供不同编程背景的开发者参考。通过实践这些代码,你可以更深入地理解A*算法的工作原理及其在寻路问题中的应用。
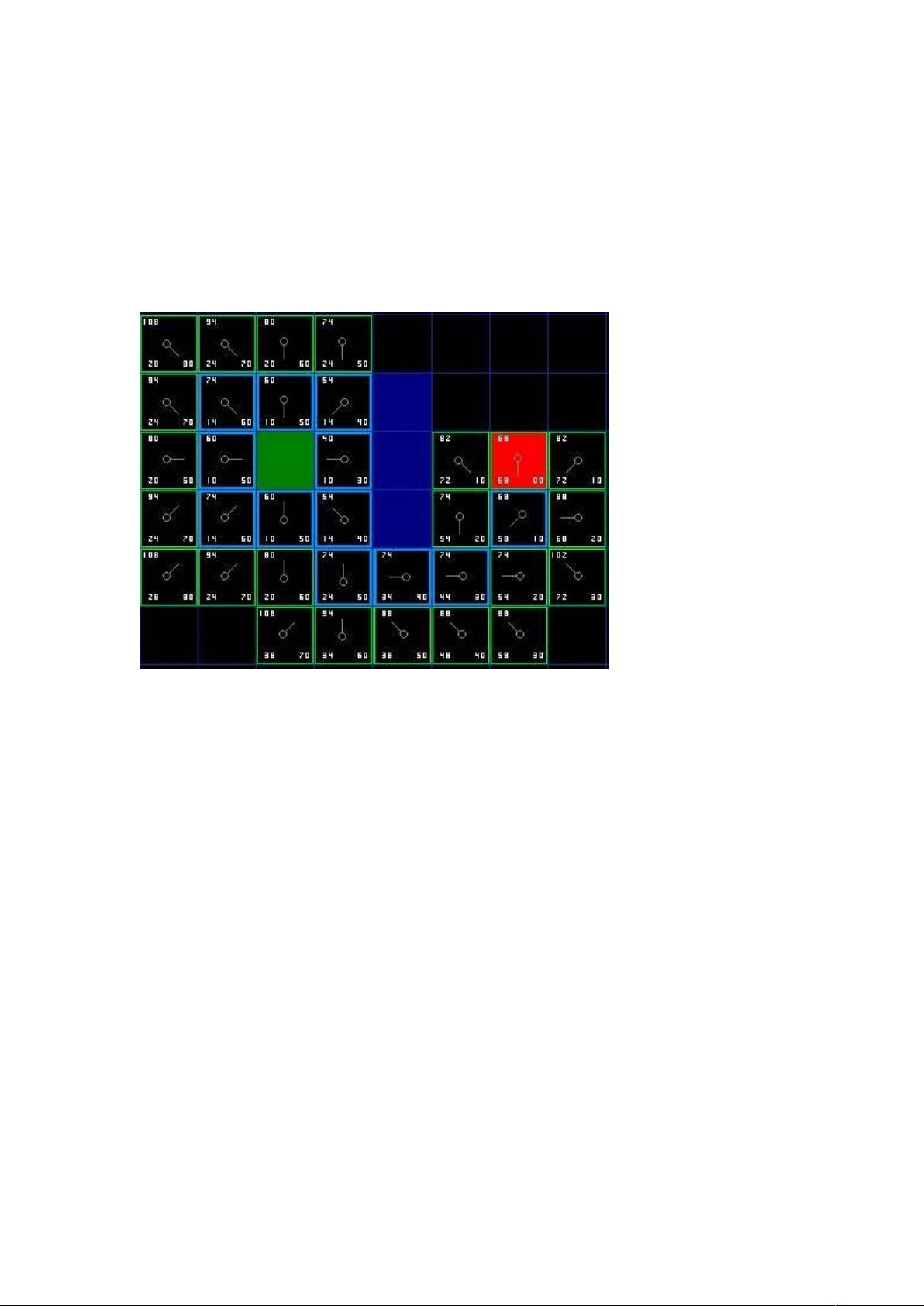
已经在开启列表中(起始格,和当前格上方的格子,在表格中蓝色高亮显示+
于是我们略过它们。最后一格,在当前格的左侧,将被检查通过这条路径,(
值是否更低。不必担心,我们已经准备好检查开启列表中的下一格了。
我们重复这个过程,知道目标格被添加进开启列表,就如在下面的图中所看到
的。
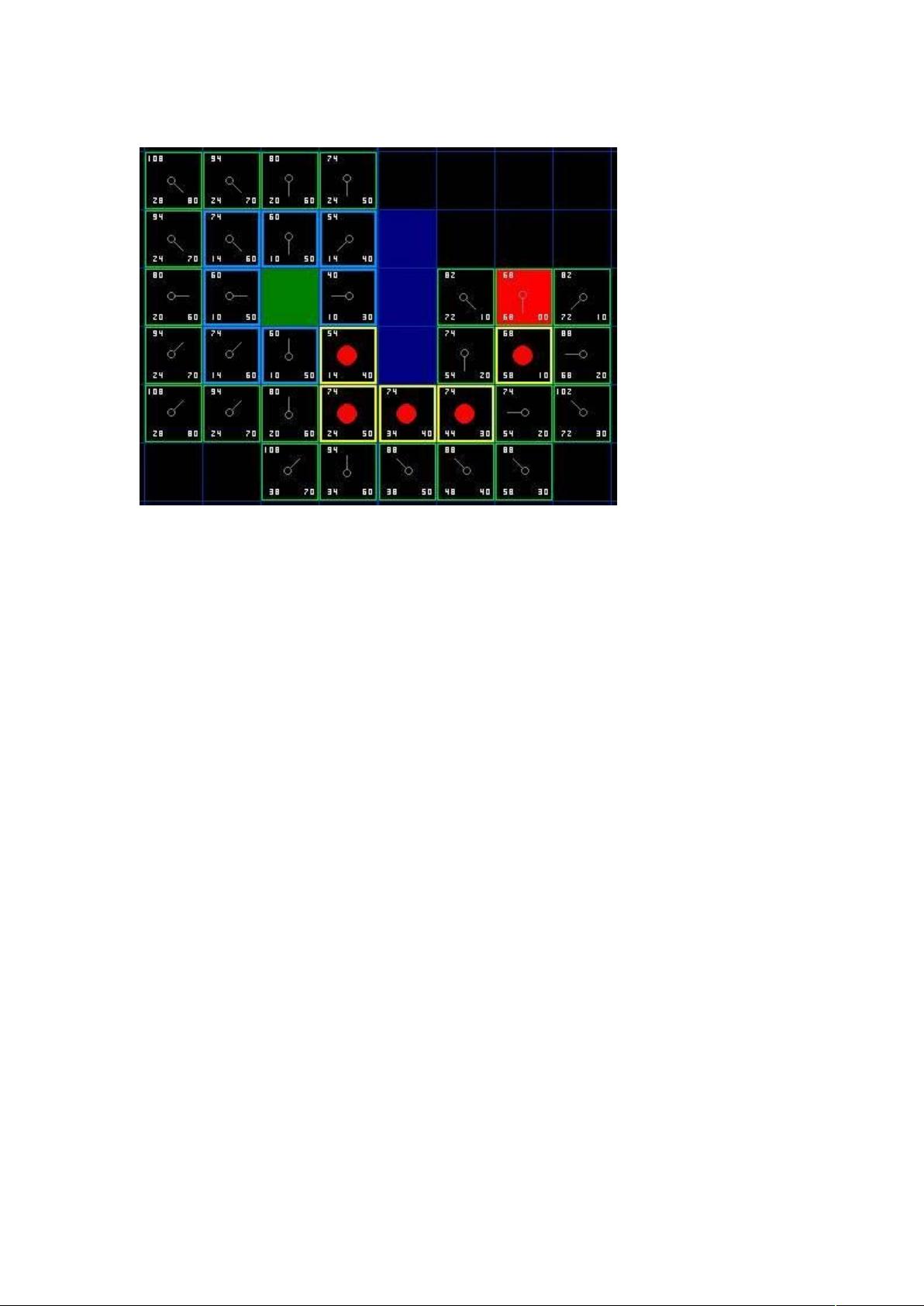
$图 -
注意,起始格下方格子的父节点已经和前面不同的。之前它的 ( 值是 /,并
且指向右上方的格子。现在它的 ( 值是 ,指向它上方的格子。这在寻路过
程中的某处发生,当应用新路径时,( 值经过检查变得低了-于是父节点被重
新指定,( 和 & 值被重新计算。尽管这一变化在这个例子中并不重要,在很多
场合,这种变化会导致寻路结果的巨大变化。
那么,我们怎么确定这条路径呢?很简单,从红色的目标格开始,按箭头的方
向朝父节点移动。这最终会引导你回到起始格,这就是你的路径!看起来应该
像图中那样。从起始格 移动到目标格 ! 只是简单的从每个格子(节点)的中
点沿路径移动到下一个,直到你到达目标点。就这么简单。
剩余35页未读,继续阅读
2011-12-18 上传
2024-07-15 上传
2024-03-06 上传
2024-06-13 上传
2024-09-16 上传
2023-05-12 上传
2024-07-24 上传
2023-06-07 上传

Walkac
- 粉丝: 0
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 天池大数据比赛:伪造人脸图像检测技术
- ADS1118数据手册中英文版合集
- Laravel 4/5包增强Eloquent模型本地化功能
- UCOSII 2.91版成功移植至STM8L平台
- 蓝色细线风格的PPT鱼骨图设计
- 基于Python的抖音舆情数据可视化分析系统
- C语言双人版游戏设计:别踩白块儿
- 创新色彩搭配的PPT鱼骨图设计展示
- SPICE公共代码库:综合资源管理
- 大气蓝灰配色PPT鱼骨图设计技巧
- 绿色风格四原因分析PPT鱼骨图设计
- 恺撒密码:古老而经典的替换加密技术解析
- C语言超市管理系统课程设计详细解析
- 深入分析:黑色因素的PPT鱼骨图应用
- 创新彩色圆点PPT鱼骨图制作与分析
- C语言课程设计:吃逗游戏源码分享
