TI-RTOS CC26xx开发指南:任务、同步与中断
需积分: 50 119 浏览量
更新于2024-07-15
2
收藏 3.46MB PDF 举报
本教程是无锡谷雨电子有限公司针对TI-RTOS开发编写的详细指南,主要针对CC26xx平台。发布日期为2017年6月29日,适用于谷雨物联网开发平台。教程内容覆盖了TI-RTOS的核心概念、开发流程和关键功能,共分为九个章节:
1. 第一章 TI-RTOS:介绍什么是TI-RTOS,包括其组成部分,以及如何下载和安装。这一部分指导用户如何在IAR环境中创建RTOS工程,并提供相关的开发资料详情。
2. 第二章 任务:详述任务的基础知识,如任务类型、优先级、状态和堆栈管理。通过实例演示,学习如何创建、删除任务,以及任务抢占和优先级调整。
3. 第三章 任务间同步:讲解信号量、事件、队列和邮箱等同步机制。如何创建和操作这些工具以实现任务间的协调,如二值信号量用于任务控制和互斥访问,事件用于任务等待,队列用于数据传递,邮箱则用于消息传递。
4. 第四章 HWI (硬件中断):介绍了如何创建和配置硬件中断,讨论了硬件中断嵌套和系统堆栈大小,以及与Hwihooks、Register函数等相关内容。
5. 第五章 SWI (软件中断):讲解SWI对象的创建、优先级设置、中断执行过程以及同步Swi函数和Swihooks的使用。
6. 其他章节:包括时间服务、RTOS实验例程说明和APIs列表,这些都是实际开发过程中不可或缺的部分,提供了丰富的实践案例和编程接口。
整个教程旨在帮助开发者理解和掌握TI-RTOS在CC26xx平台上的应用,无论是初学者还是经验丰富的开发人员,都能从中找到所需的信息和实践指导。通过阅读和实践这些内容,用户将能有效地构建和管理复杂的实时操作系统环境。

谷雨物联网开发平台 TI-RTOS 开发教程 http://www.iotxx.com
第 14 页 共 86 页
用户创建的任务(TASK)
空闲任务(IDLE)
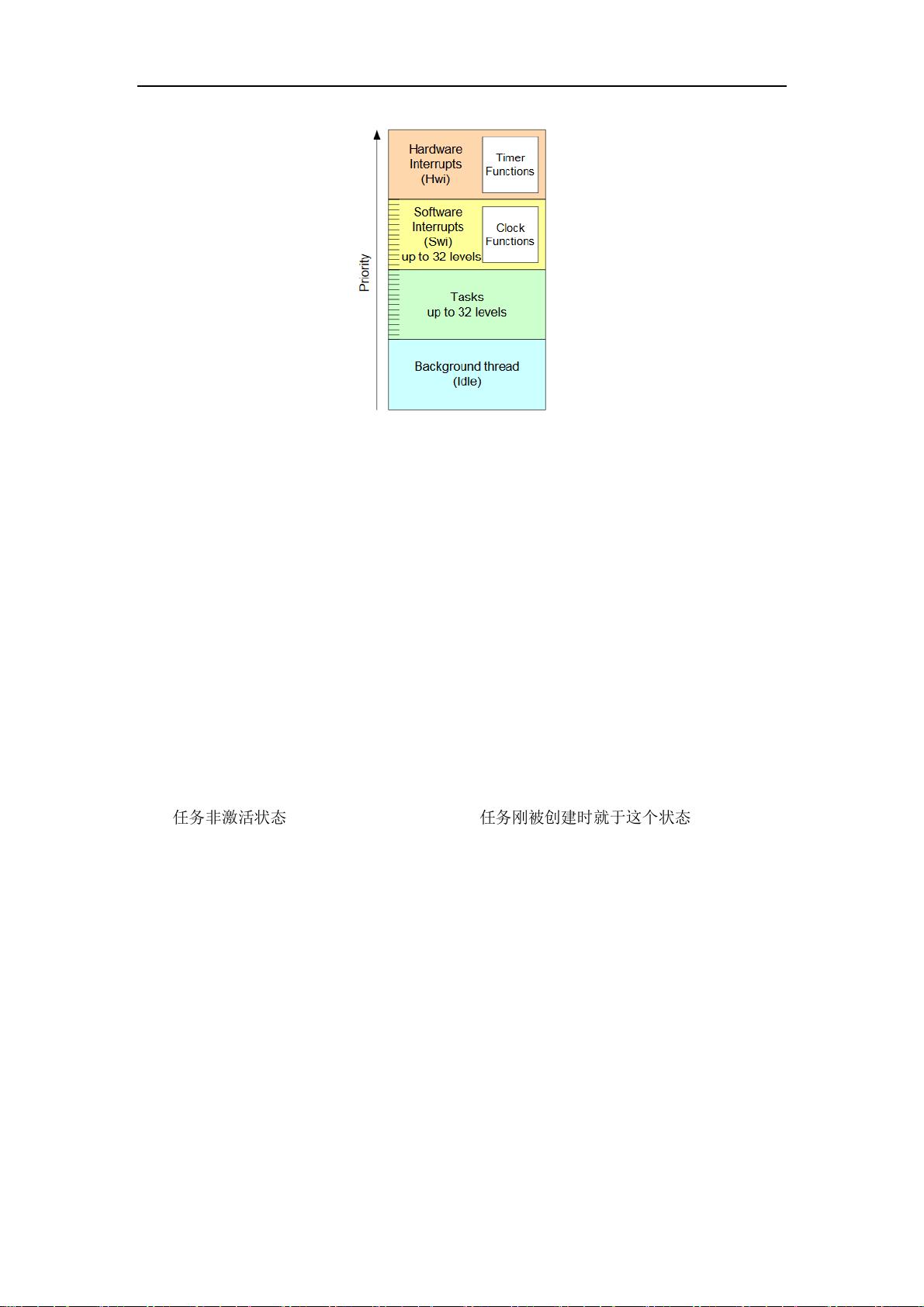
HWI 也称为中断服务例程或 ISR,在 SYS / BIOS 应用程序中具有最高优先级的线程。 Hwi
任务用于执行时间受到严格的限期的关键任务。 在实时环境中,它是响应外部触发的异步
事件(中断)。详细的硬件中断说明,将在后面进行说明。
SWI 也称为软件中断服务例程。在 SYS/BIOS 中,SWI 任务优先级在 HWI 任务和用户任
务之间。不像 HWI 由硬件中断触发,SWI 是通过调用 SWI 模块 API 方式触发。SWI 允许 HWI
将较少的关键处理推迟到较低优先级的任务中,这样可以最小化 CPU 在中断服务程序中花
费的时间。SWI 需要足够的空间来保存每个 SWI 中断优先级的上下文。
TASK 用户任务,此类型的任务优先级高于系统空闲任务,低于 SWI。TASK 不同于 SWI,
它们在运行过程中,可以被阻塞只到必要的资源可用。TASK 要求每个任务要有自己独立的
栈空间。SYS/BIOS 提供了一些机制用于 TASK 间的同步和通信,它们有信号量(Semphore),
事件(Events),队列(Queue)和邮箱(Mailboxes)。
系统任务之空闲任务。空闲任务运行在最低优先级下。它于用户任务没有什么区别,只
是它由 TI-RTOS 自己创建。当 SYS/BIOS 没有比空闲任务更高的任务运行时,SYS/BIOS 就会执
行空闲任务,并且是连接执行,直到有更高的任务进入就绪状态。
2.2 任务优先级
TI-RTOS 是一个可剥夺型操作系统,其任务的优先级是任务调度算法的基准。所以任务
优先级是比较重要的。
在 SYS/BIOS 中,HWI 有最高优先级。其优先级不能被 SYS/BIOS 维护,它是 CPU 特性决
定。硬件中断也可以被其也的中断抢占,除非全局中断禁用或特定的中能被单独禁用。
SWI 的优先级低于 HWI。它有优先级可以达到 32 级,默认只有 16 级。SWI 可以被更高
优先级的 SWI 和 HWI 抢占,但是 SWI 是不会阻塞的。
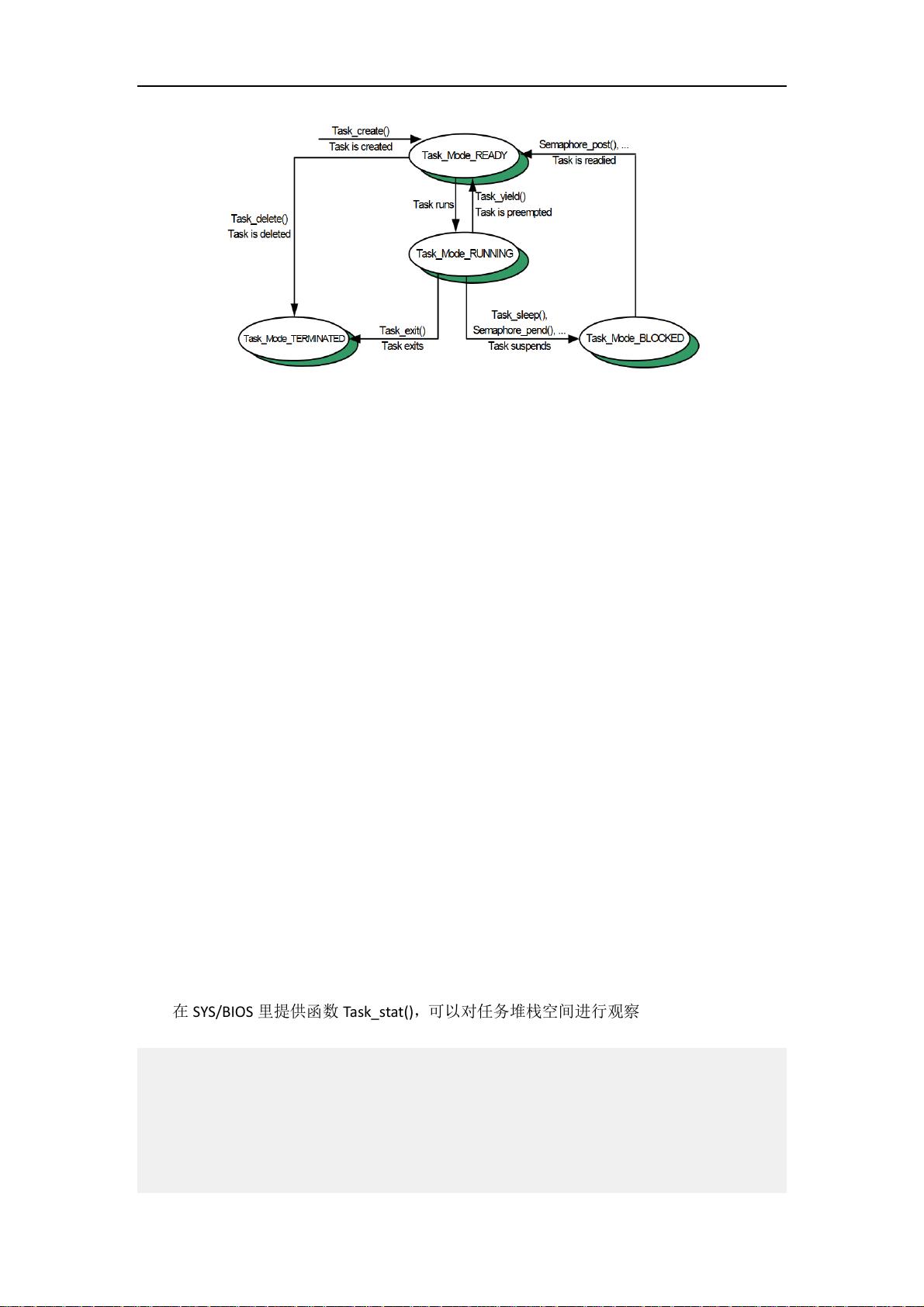
Task 的优先级低行 SWI。它的优先级也可以达到 32 级,默认是 16 级。Task 优先级数值
越大,其优先级就越高,0 是优先级最低的。Task 可以被更高优先级 Task 抢占。当 Task 等
待资源时,Task 可以被阻塞。Task 的优先级可以通过 Task_setPri 函数动态的更改。新的优先
级必须在 1 到 TnumPriorities – 1 之间。当新优先级数低于当前优先级时,可能会发生任务切
的换。
空闲任务优先级在所有任务中是最低的。当 CPU 不忙时,空闲任务就会被执行。其运
行在 Task 任务 0 优先级上。

剩余86页未读,继续阅读
2099 浏览量
点击了解资源详情
点击了解资源详情
288 浏览量
103 浏览量
108 浏览量
2021-09-30 上传
146 浏览量
109 浏览量

njuptmjb
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- c程序,脑电数据处理,包括预处理,能量特征提取,fisher分类
- leetcode-solutions:流行的Leetcode问题的解决方案和学习资源
- 2013年述职述廉述学报告
- Auto Form Filler-crx插件
- 包文件结构
- 钉钉 For Mac_v5.0.11.0
- 电信设备-具备利用多个通信线路的DNC运转功能的数值控制装置.zip
- Java版QQ签到源码-dgc-gateway:dgc网关的存储库
- nodejs-course
- 银行员工年度考核总结
- C#中picturebox的图像拼接
- SwapSpace:一款类似58同城的app
- matlab的slam代码-ICIEA2018_IEKF_LeastSquare_Comparison:这是我论文中模拟的Matlab代码:基
- 中国茶文化主题网站模板
- goretube.github.io
- djembedb-react
