实时激光雷达定位与建图:LOAM方法详解
需积分: 44 82 浏览量
更新于2024-09-09
收藏 3.48MB PDF 举报
Lidar Odometry and Mapping in Real Time (LOAM) 是一项由 Ji Zhang 和 Sanjiv Singh 在 Robotics: Science and Systems 2014 年的会议上提出的关键贡献。这项研究关注于实时解决机器人在6自由度(6-DOF)运动中,通过2轴激光雷达进行精确定位和建图的问题。传统的SLAM(Simultaneous Localization and Mapping)方法往往依赖于离线批处理,通过闭环检测来校正累积误差,但 LOAM 提供了一种创新的解决方案。
LOAM 的核心挑战在于处理时间延迟的激光测距数据,这些数据不同时到达,可能导致地图的不一致性或误注册。为了解决这个问题,LOAM 采用了两个主要算法。第一个算法运行在较高的频率上,但精度较低,主要用于快速估计激光雷达的运动速度,提供实时的粗略估计。这种低精度但高频率的策略有助于保持系统响应的实时性。
第二个算法的工作频率则相对较低,但其精度大大提高,负责精细匹配和点云的注册。这两个算法的结合至关重要,一个负责维持实时运动估计,另一个则确保地图的准确性和长期一致性。这种方法的优势在于无需依赖高级别的精确测距或惯性测量单元,从而降低了对硬件的需求,并保持了较低的计算复杂度。
通过这种分层处理方式,LOAM 实现了低漂移和低运算负担,使得机器人能够在没有外部辅助传感器的情况下,如GPS或IMU,构建和维护精确的3D地图。这对于自动驾驶、无人机导航和其他对实时定位要求高的应用来说,具有显著的实际价值。LOAM 方法为实时SLAM领域设定了一个新的基准,成为了后续研究者和工程师们的重要参考资源。
Robotics: Science and Systems 2014
Berkeley, CA, USA, July 12-16, 2014
1
LOAM: Lidar Odometry and Mapping in Real-time
Ji Zhang and Sanjiv Singh
Abstract— We propose a real-time method for odometry and
mapping using range measurements from a 2-axis lidar moving
in 6-DOF. The problem is hard because the range measurements
are received at different times, and errors in motion estimation
can cause mis-registration of the resulting point cloud. To date,
coherent 3D maps can be built by off-line batch methods, often
using loop closure to correct for drift over time. Our method
achieves both low-drift and low-computational complexity with-
out the need for high accuracy ranging or inertial measurements.
The key idea in obtaining this level of performance is the
division of the complex problem of simultaneous localization and
mapping, which seeks to optimize a large number of variables
simultaneously, by two algorithms. One algorithm performs
odometry at a high frequency but low fidelity to estimate velocity
of the lidar. Another algorithm runs at a frequency of an order of
magnitude lower for fine matching and registration of the point
cloud. Combination of the two algorithms allows the method to
map in real-time. The method has been evaluated by a large set
of experiments as well as on the KITTI odometry benchmark.
The results indicate that the method can achieve accuracy at the
level of state of the art offline batch methods.
I. INTRODUCTION
3D mapping remains a popular technology [1]–[3]. Mapping
with lidars is common as lidars can provide high frequency
range measurements where errors are relatively constant irre-
spective of the distances measured. In the case that the only
motion of the lidar is to rotate a laser beam, registration of the
point cloud is simple. However, if the lidar itself is moving
as in many applications of interest, accurate mapping requires
knowledge of the lidar pose during continuous laser ranging.
One common way to solve the problem is using independent
position estimation (e.g. by a GPS/INS) to register the laser
points into a fixed coordinate system. Another set of methods
use odometry measurements such as from wheel encoders or
visual odometry systems [4], [5] to register the laser points.
Since odometry integrates small incremental motions over
time, it is bound to drift and much attention is devoted to
reduction of the drift (e.g. using loop closure).
Here we consider the case of creating maps with low-
drift odometry using a 2-axis lidar moving in 6-DOF. A key
advantage of using a lidar is its insensitivity to ambient lighting
and optical texture in the scene. Recent developments in lidars
have reduced their size and weight. The lidars can be held by
a person who traverses an environment [6], or even attached
to a micro aerial vehicle [7]. Since our method is intended to
push issues related to minimizing drift in odometry estimation,
it currently does not involve loop closure.
The method achieves both low-drift and low-computational
complexity without the need for high accuracy ranging or
J. Zhang and S. Singh are with the Robotics Institute at Carnegie Mellon
University. Emails: zhangji@cmu.edu and ssingh@cmu.edu.
The paper is based upon work supported by the National Science Founda-
tion under Grant No. IIS-1328930.
Lidar
Lidar
Mapping
Odometry
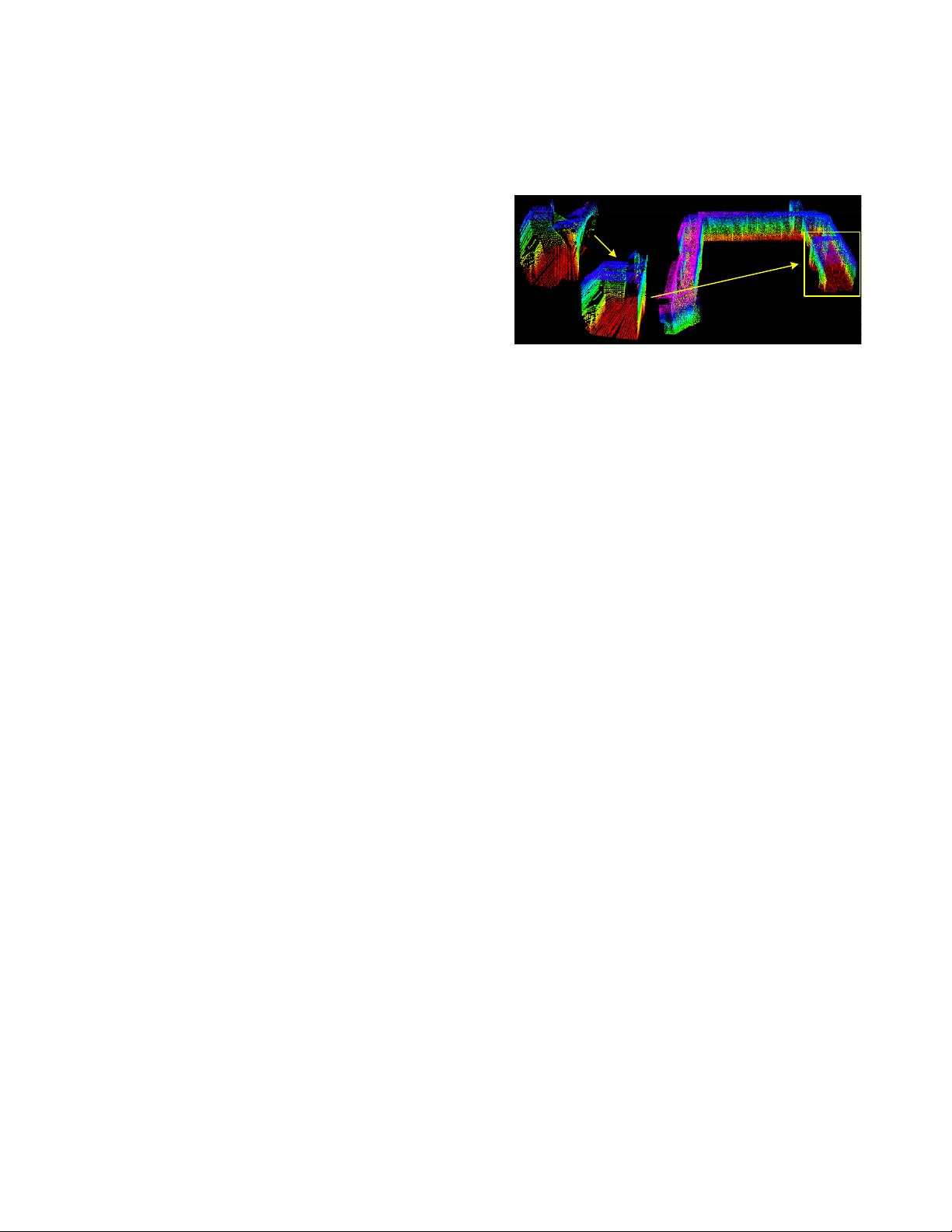
Fig. 1. The method aims at motion estimation and mapping using a moving
2-axis lidar. Since the laser points are received at different times, distortion is
present in the point cloud due to motion of the lidar (shown in the left lidar
cloud). Our proposed method decomposes the problem by two algorithms
running in parallel. An odometry algorithm estimates velocity of the lidar and
corrects distortion in the point cloud, then, a mapping algorithm matches and
registers the point cloud to create a map. Combination of the two algorithms
ensures feasibility of the problem to be solved in real-time.
inertial measurements. The key idea in obtaining this level of
performance is the division of the typically complex problem
of simultaneous localization and mapping (SLAM) [8], which
seeks to optimize a large number of variables simultaneously,
by two algorithms. One algorithm performs odometry at a high
frequency but low fidelity to estimate velocity of the lidar. An-
other algorithm runs at a frequency of an order of magnitude
lower for fine matching and registration of the point cloud.
Although unnecessary, if an IMU is available, a motion prior
can be provided to help account for high frequency motion.
Specifically, both algorithms extract feature points located on
sharp edges and planar surfaces, and match the feature points
to edge line segments and planar surface patches, respectively.
In the odometry algorithm, correspondences of the feature
points are found by ensuring fast computation. In the mapping
algorithm, the correspondences are determined by examining
geometric distributions of local point clusters, through the
associated eigenvalues and eigenvectors.
By decomposing the original problem, an easier problem is
solved first as online motion estimation. After which, mapping
is conducted as batch optimization (similar to iterative closest
point (ICP) methods [9]) to produce high-precision motion
estimates and maps. The parallel algorithm structure ensures
feasibility of the problem to be solved in real-time. Further,
since the motion estimation is conducted at a higher frequency,
the mapping is given plenty of time to enforce accuracy.
When running at a lower frequency, the mapping algorithm
is able to incorporate a large number of feature points and use
sufficiently many iterations for convergence.
II. RELATED WORK
Lidar has become a useful range sensor in robot navigation
[10]. For localization and mapping, most applications use 2D
lidars [11]. When the lidar scan rate is high compared to
its extrinsic motion, motion distortion within the scans can
下载后可阅读完整内容,剩余8页未读,立即下载
2021-02-04 上传
2020-05-09 上传
2023-09-08 上传
2023-02-07 上传
2023-07-13 上传
2023-06-09 上传
2023-07-25 上传
2023-05-31 上传

chengwei0019
- 粉丝: 319
- 资源: 28
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
