Linux环境下QGroundControl源码部署与编译指南
需积分: 5 124 浏览量
更新于2024-08-04
1
收藏 1.03MB DOCX 举报
"本文档详细介绍了如何在Linux环境下搭建QGroundControl(QGC)。QGroundControl是一款开源的地面控制站软件,广泛应用于无人机和其他 MAVLink 协议支持的无人系统。以下是具体的步骤和常见问题解决方案。
一、获取QGC源码
首先,你需要通过Git从Mavlink的GitHub仓库克隆QGC源码,同时使用`--recursive`参数确保所有子模块一同被克隆下来。执行以下命令:
```bash
git clone --recursive -j8 https://github.com/mavlink/qgroundcontrol.git
```
之后初始化和更新子模块:
```bash
git submodule init
git submodule update --recursive
```
二、安装依赖库
在安装QGC之前,确保你的Linux系统上安装了必要的依赖库。具体依赖项会因发行版而异,但通常包括开发工具、库和框架等。请参照QGC的官方文档或项目README文件来获取确切的依赖列表。
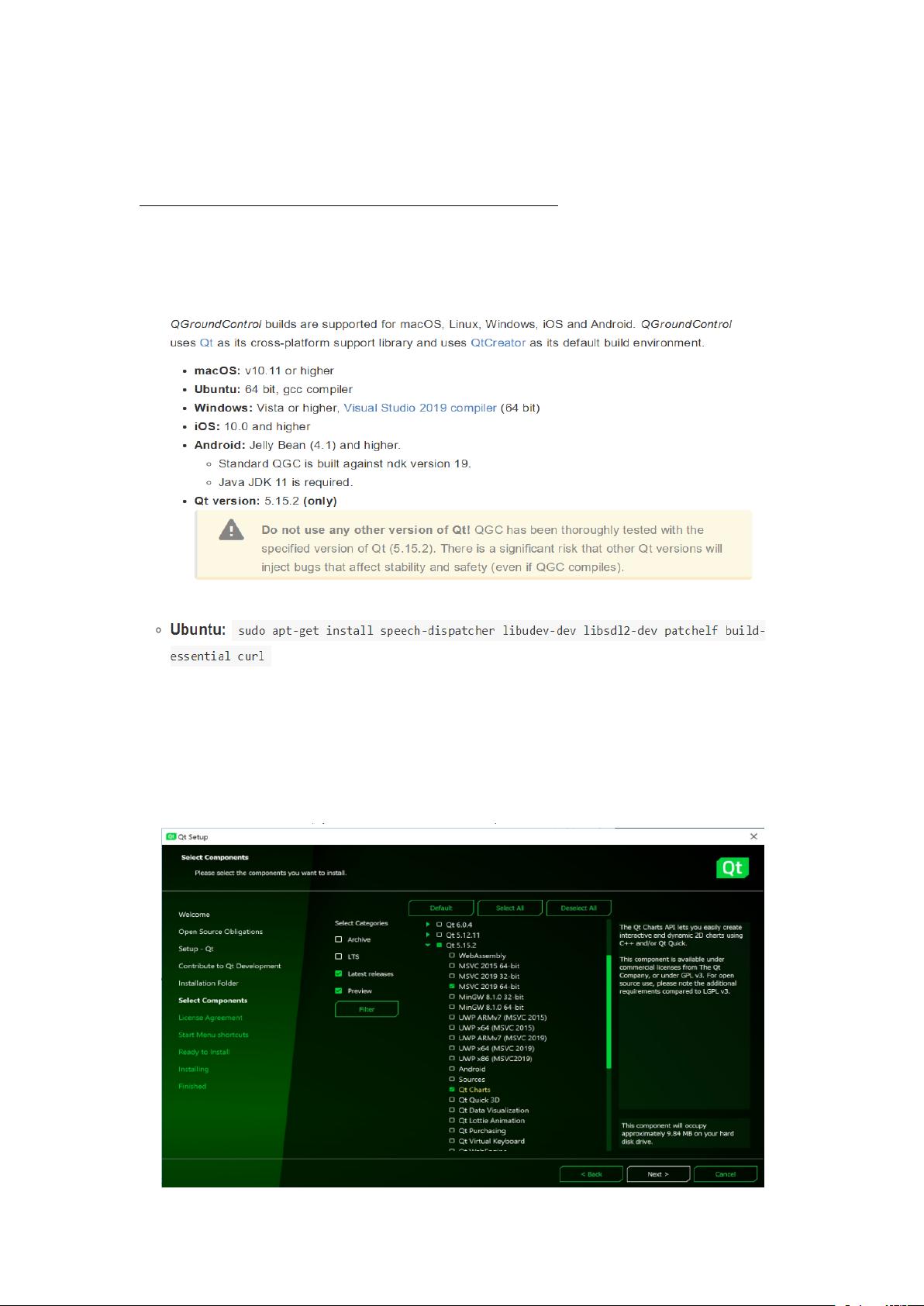
三、安装Qt
访问Qt官方网站,下载适用于Linux的5.15.2版本。下载完成后,给.run文件添加执行权限并运行它进行安装。安装过程中可能需要创建Qt账户,并根据需要选择安装组件。安装完成后,编辑`/etc/profile`文件,添加Qt的环境变量,然后执行`source /etc/profile`使设置生效。
四、Qt环境配置
在Qt环境中配置QGC项目,打开Qt Creator,然后导航到QGC代码主目录,按照向导步骤进行配置。确保正确设置了编译器和设备目标。
五、QGC源码编译
有两种编译方法:使用qtcreator或qmake命令行工具。对于qmake,可以执行`qmake`命令开始编译,或用`make`命令进行增量编译。如果需要仅编译改动的部分,可以执行`make`或`ninja`(如果使用了Ninja构建系统)。
六、异常问题处理
1. 如果在编译时遇到与AirMap相关的错误,可以通过在qgc主目录下创建一个名为`user_config.pri`的文件,然后添加内容`DEFINES+=DISABLE_AIRMAP`来禁用AirMap功能:
```bash
echo -e "DEFINES+=DISABLE_AIRMAP\r\n" | tee user_config.pri
```
2. 如果遇到`No rule to make target`错误,检查项目的`pro`文件,确认`SOURCES`和`HEADERS`模块中文件路径无误且已添加。
3. 如果提示`MAVLink folder does not exist`,可能是因为在克隆QGC时未递归下载`mavlink`子模块。使用以下命令重新下载:
```bash
git submodule update --recursive
```
如果依然失败,检查主目录下是否存在隐藏的`.gitmodules`文件,并根据其内容手动下载缺失的子模块。
总结:
搭建QGroundControl的Linux环境涉及多个步骤,包括获取源码、安装依赖、配置Qt环境以及编译源码。在过程中可能会遇到各种问题,如上述示例所示,但通常都有相应的解决方法。遵循文档,细心操作,确保每个步骤都正确完成,就能成功在Linux上搭建QGC并进行开发或调试工作。"
下载后可阅读完整内容,剩余3页未读,立即下载
346 浏览量
359 浏览量
2025-02-25 上传
234 浏览量
262 浏览量
2025-02-10 上传

一根呆毛芋
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- React.js实现的简单HTML5文件拖放上传组件
- iReport:强大的开源可视化报表设计器
- 提升代码整洁性:Eclipse虚线对齐插件指南
- 迷你时间秀:个性化系统时间显示与管理工具
- 使用ruby-install一次性安装多种Ruby版本
- Logality:灵活自定义的JSON日志记录器
- Mogre3D游戏开发实践教程免费分享
- PHP+MySQL实现的简单权限账号管理小程序
- 微信支付统一下单签名错误排查与解决指南
- 虚幻引擎4实现的多边形地图生成器
- TouchJoy:专为触摸屏Windows设备打造的屏幕游戏手柄
- 全方位嵌入式开发工具包:ARM平台必备资源
- Java开发必备:30个实用工具类全解析
- IBM475课程资料深度解析
- Java聊天室程序:全技术栈源码支持与学习指南
- 探索虚拟房屋世界:house-tour-VR应用体验
