
第
30
卷第
5
期
2
∞
1
年
10
月
电子科技大学学报
Joumal
of
UEST
of
China
Vo
1.3
0 No.5
Oc
t.
2001
一种新型虚拟轴机床的结构设计与位置分析
范守文*
徐礼钮
甘泉
(电子科技大学电子机械系成都
610054)
(四川大学制造科学与工程学院成都
610065)
【摘要】提出了以四自由度空间并联机构作为主进给机构,辅以双向移动工作台实现多坐标数控加玉的
一种新型虚拟轴机床的结构设计方案。该虚拟轴机床具有工作空间大、灵巧性好、位直与姿态解辑等优点。
计算了主进给机构的自由度,给出了位直反解的方法,推导出了位直正解的封闭方程,并给出了数值实例。
关键词虚拟轴机床;
结构设计:
位直分析:
结式消元
中图分类号
TP242.2
虚拟轴机床,又称为并联机床,是
90
年代中期问世的数控机床新结构,是机器人技术与机床
结构技术结合的产物,其原型是并联机器人操作机[]]。目前虚拟轴机床的原型大多都是基于
Stewart
平台及其变形型式的结构。该类虚拟轴机床最大特点是加工精度高、结构抗震性及切削稳定性好,
但同时也存在工作空间小、难于实现大倾角加工等不足。本文提出一种基于四自由度空间并联机
构的虚拟轴机床的新结构[坷,并对其进行了位置分析。
1
新型虚拟轴机床的结构设计
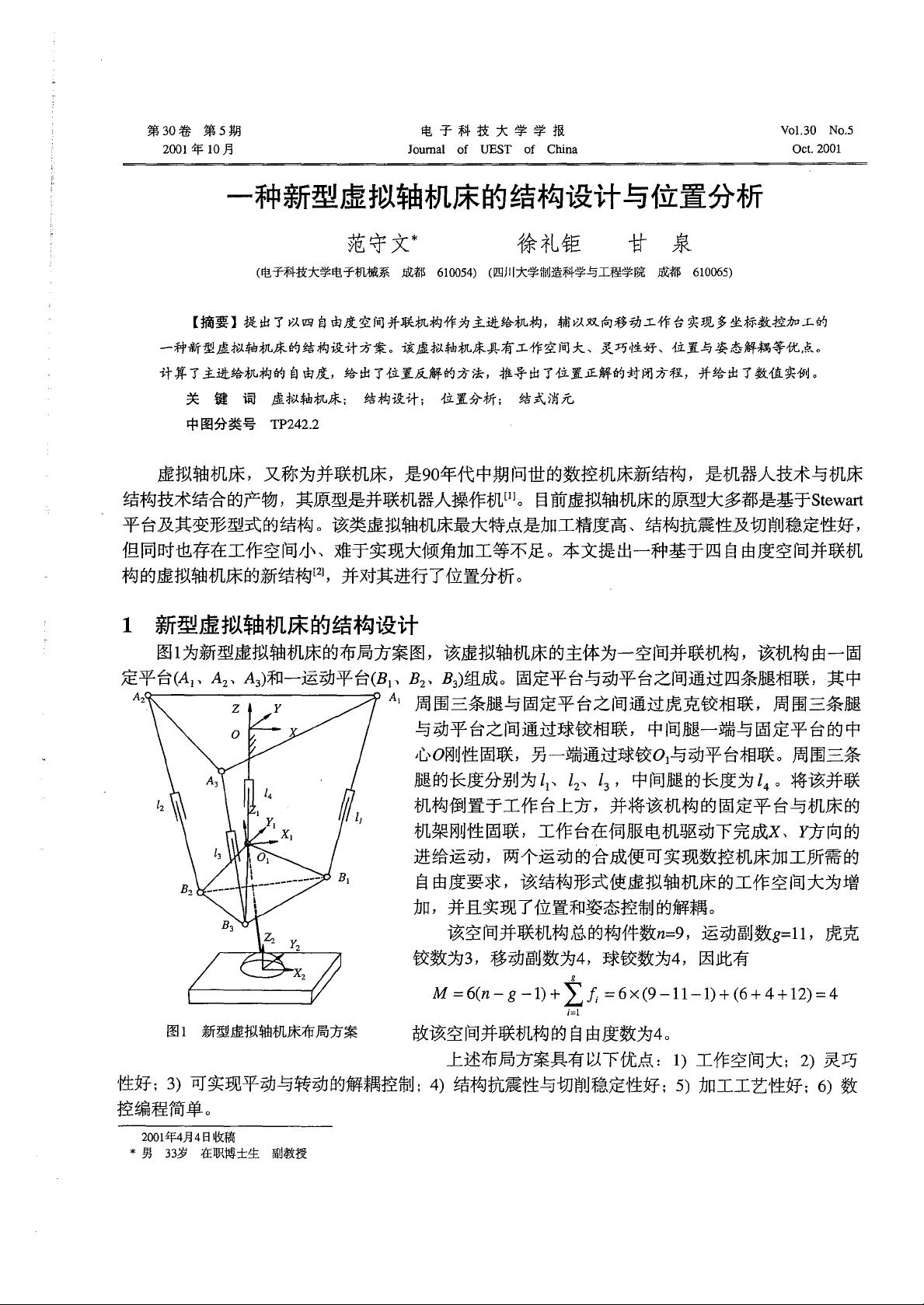
图
1
为新型虚拟轴机床的布局方案图,该虚拟轴机床的主体为一空间并联机构,该机构由一固
定平台
(A]
、
A
2
、
A
3
)
和一运动平台
(B]
、
B
2
、民)组成。固定平台与动平台之间通过四条腿相联,其中
Mf\:
:;:?
A
,周围三条腿与固定平台之间通过虎克饺相联,周围三条腿
与动平台之间通过球饺相联,中间腿一端与固定平台的中
心。刚性固联,另一端通过球饺
0]
与动平台相联。周围三条
腿的长度分别为
1
1
、
1
2
、儿,中间腿的长度为
14
。将该并联
机构倒置于工作台上方,并将该机构的固定平台与机床的
机架刚性固联,工作台在伺服电机驱动下完成
X
、
Y
方向的
进给运动,两个运动的合成便可实现数控机床加工所需的
自由度要求,该结构形式使虚拟轴机床的工作空间大为增
加,并且实现了位置和姿态控制的解嘱。
该空间并联机构总的构件数
n=9
,
运动副数
g=
l1,
虎克
钱数为
3
,移动副数为
4
,球饺数为
4
,因此有
M=
仰
-g
一
1)
+立
fi
=6x(9-11
一川
6+4+
昨
图
1
新型虚拟轴机床布局方案
故该空间并联机构的自由度数为
4
。
上述布局方案具有以下优点
1)
工作空间大;
2)
灵巧
性好;
3)
可实现平动与转动的解桐控制;
4)
结构抗震性与切削稳定性好;
5)
加工工艺
'1
生好;
6)
数
控编程简单。
2001
年
4
月
4
日收稿
*另
33
岁在职博士生副教授
下载后可阅读完整内容,剩余3页未读,立即下载

weixin_38501916
- 粉丝: 1
- 资源: 935
 我的内容管理
展开
我的内容管理
展开







最新资源
- ExtJS 2.0 入门教程与开发指南
- 基于TMS320F2812的能量回馈调速系统设计
- SIP协议详解:RFC3261与即时消息RFC3428
- DM642与CMOS图像传感器接口设计与实现
- Windows Embedded CE6.0安装与开发环境搭建指南
- Eclipse插件开发入门与实践指南
- IEEE 802.16-2004标准详解:固定无线宽带WiMax技术
- AIX平台上的数据库性能优化实战
- ESXi 4.1全面配置教程:从网络到安全与实用工具详解
- VMware ESXi Installable与vCenter Server 4.1 安装步骤详解
- TI MSP430超低功耗单片机选型与应用指南
- DOS环境下的DEBUG调试工具详细指南
- VMware vCenter Converter 4.2 安装与管理实战指南
- HP QTP与QC结合构建业务组件自动化测试框架
- JsEclipse安装配置全攻略
- Daubechies小波构造及MATLAB实现
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


