TC1724与TC1728之间的CAN通信实践
需积分: 34 20 浏览量
更新于2024-09-07
1
收藏 904KB PDF 举报
"该文主要介绍了如何使用CAN总线实现TC1724和TC1728之间的简单控制和数据通信。实验中涉及到的主要组件包括CAN模块、ASC(Advanced Serial Communication)模块以及IO模块。文章通过两部分的实验详细阐述了数据传输的过程,包括从TC1724发送数据到TC1728,再由TC1728将接收到的数据回传至TC1724,并根据接收到的数据进行特定操作,如改变P5.5端口的LED灯状态。实验中使用了DAVE软件进行CAN报文的配置,并通过RS232串口与PC进行交互。"
本文主要探讨了使用CAN总线在英飞凌的TC1724和TC1728微控制器之间进行通信的方法。CAN (Controller Area Network)是一种广泛应用的现场总线,尤其在汽车电子系统中,因其高可靠性、抗干扰性和低延迟而受到青睐。在本次实验中,TC1724和TC1728分别配置了CAN0接口,通过报文配置来实现数据交换。
首先,配置CAN模块的报文对象(MO)。在TC1724中,MO010用于接收数据,ID为018,数据宽度为8字节,帧标识符选择11位,属于Node0,并设置了接受中断;MO012用于发送数据,ID为216,同样为8字节和11位帧标识符,但没有中断设置。而在TC1728上,MO010和MO012的配置与TC1724相反,接收ID为216,发送ID为018,确保了两者之间正确的数据流向。
实验的第一部分是简单的数据传输。通过终端软件MTTTY,用户可以向TC1724发送数据,这些数据经由CAN0发送到TC1728。TC1728接收到数据后,不仅将其回传给TC1724,还会检查数据是否为字符'a'。如果是,TC1728会翻转P5.5端口的信号,从而影响连接的LED灯的亮灭状态。用户在PC端看到的数据反馈,可以直观地观察到这种控制效果。
实验的第二部分是数据的双向传输。TC1724接收到TC1728回传的数据后,会通过RS232串口再次发送给PC,使得用户可以通过PC界面输入字符,控制TC1728的P5.5端口LED灯的状态。
整个实验流程中,CAN总线的使用简化了微控制器间的通信,通过DAVE软件的配置,确保了数据的正确传输和处理。通过RS232串口,用户可以直观地参与到这个过程中,增强了实验的可操作性和互动性。实验展示了CAN总线在实时控制系统中的应用,以及如何利用英飞凌的TC17x系列微控制器进行数据通信和设备控制。
使用 CAN 进行 TC1724 和 TC1728 的简单控制和数据通信
xiyanpeng
首先进行连接和配置说明,然后分两部分进行实验,第一部分:通过 CAN
线连接 TC1724 和 TC1728,进行简单控制;第二部分:通过 CAN 线连接 TC1724
和 TC1728,从 TC1724 传送数据到 TC1728,然后 TC1728 把 TC1724 传来的数据,
发送回 TC1724。
使用到的模块有:TC1724 的 CAN、ASC,TC1728 的 CAN、IO 模块。
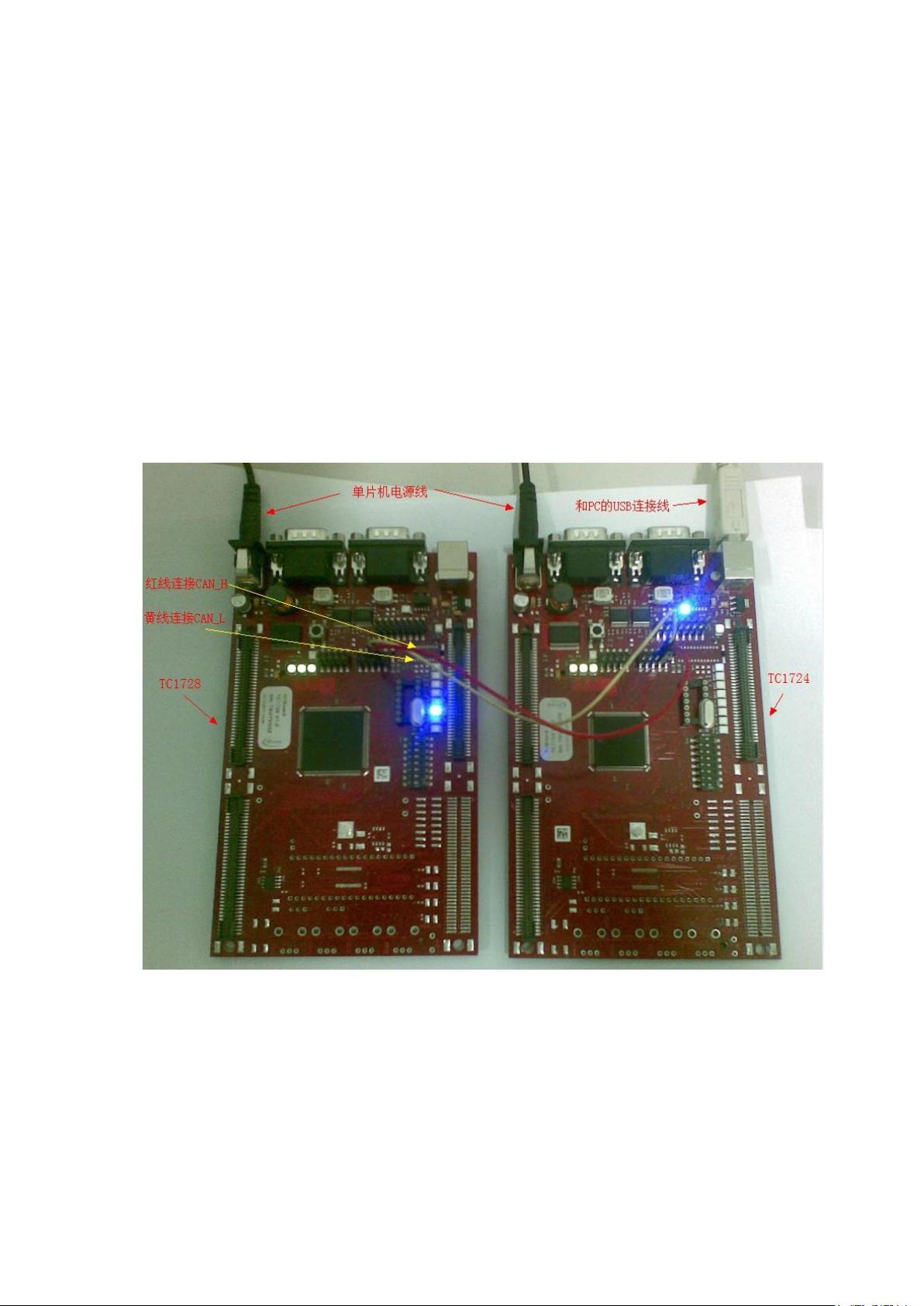
实物连接图如下(连接已在图中标记说明):
下载后可阅读完整内容,剩余8页未读,立即下载
2164 浏览量
点击了解资源详情
1105 浏览量
1458 浏览量
197 浏览量
184 浏览量

leyiweb
- 粉丝: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易二维码签到系统:会议活动签到解决方案
- Ceres库与SDK集成指南:C++环境配置及测试程序
- 深入理解Servlet与JSP技术应用与源码分析
- 初学者指南:掌握VC摄像头抓图源代码实现
- Java实现头像剪裁与上传的camera.swf组件
- FileTime 2013汉化版:单文件修改文件时间的利器
- 波斯语话语项目:实现discourse-persian配置指南
- MP4视频文件数据恢复工具介绍
- 微信与支付宝支付功能封装工具类介绍
- 深入浅出HOOK编程技术与应用
- Jettison 1.0.1源码与Jar包免费下载
- JavaCSV.jar: 解析CSV文档的Java必备工具
- Django音乐网站项目开发指南
- 功能全面的FTP客户端软件FlashFXP_3.6.0.1240_SC发布
- 利用卷积神经网络在Torch 7中实现声学事件检测研究
- 精选网站设计公司官网模板推荐
