LPC2132驱动的双驱电动车控制系统详解:全桥逻辑与霍尔传感器
PDF格式 | 302KB |
更新于2024-08-28
| 88 浏览量 | 举报
"基于LPC2132的双驱电动车控制系统设计(二)"
本文主要讨论的是一个基于微控制器LPC2132的双驱电动车控制系统的设计,重点关注了全桥驱动电路的逻辑控制、霍尔位置传感器接口电路以及电桥驱动电路设计。这个系统旨在提供高效、安全的电机控制,以实现电动车的稳定运行。
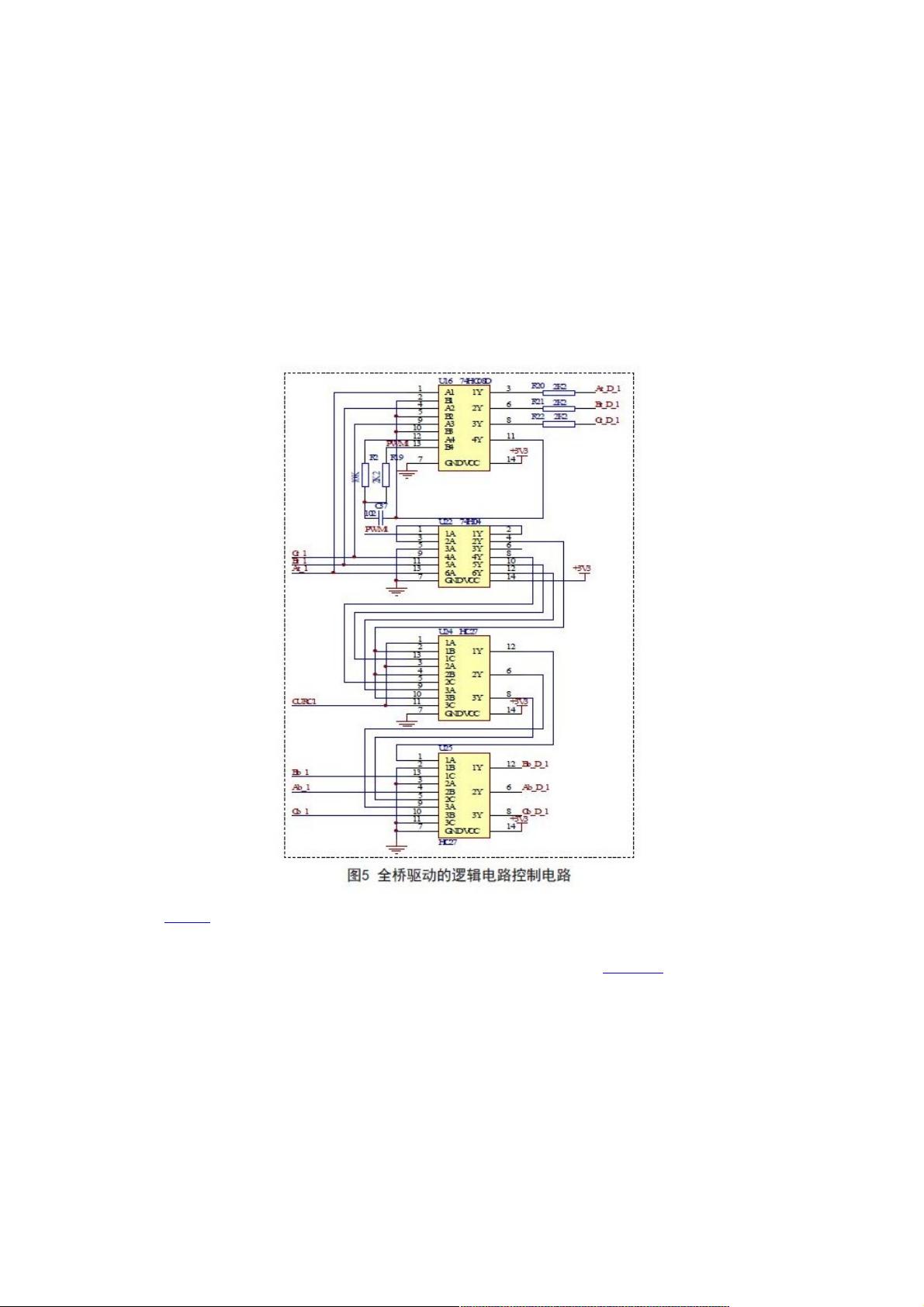
3.2 全桥驱动电路的逻辑控制电路
全桥驱动电路是电动车控制系统的核心部分,它负责根据转子的位置切换上下桥臂,确保电机绕组正确通电,从而实现电机的旋转。通过调整通电时间的比例,系统能够控制电动车的速度。死区保护机制是必不可少的,它可以防止MOSFET和驱动电路因瞬间同时导通而损坏。设计中采用了逻辑门电路与RC延时电路,确保控制过程无死区,同时增加的电机绕组续流功能有助于保护控制器件。系统中两台电机的电桥逻辑控制电路设计相同,文中展示了其中一路的电路设计。
3.3 霍尔位置传感器接口电路
无刷电机通常配备三个霍尔位置传感器,用于检测电机转子的位置。这些传感器需要5V电源供电,并且由于电机内部的电磁环境及工作时的干扰,对电源质量有较高要求。因此,系统采用独立电源供电,并且对传感器的脉冲检测电路进行了滤波处理,增强抗干扰能力。图6描绘了霍尔位置传感器接口电路的一部分。
3.4 电桥驱动电路设计
电桥驱动电路由上桥臂和下桥臂组成,每个相位都有这样的结构。上桥臂的控制信号为高电平有效,下桥臂则为低电平有效。考虑到MOSFET的导通电阻和大电流的工作条件,系统选用了IR2103这种专用驱动芯片,它能有效解决死区保护等问题,确保电路的稳定运行。
除了上述硬件设计,系统还包含了控制软件的部分。软件主要包括以下几个功能模块:
1. 两个无刷直流电机的位置检测模块,用于获取电机转子实时位置。
2. 电机换相逻辑控制模块,根据电机位置信息进行适时换相。
3. 速度调节模块,包括转速采样、PWM正反转控制和PID控制,以精确控制电动车速度。
4. 安全管理模块,监控系统状态,防止过流、过压等异常情况发生。
整个系统通过LPC2132微控制器协调这些硬件和软件模块,实现对电动车的智能化控制,确保其高效、安全地运行。
基于基于LPC2132的双驱电动车控制系统设计(二)的双驱电动车控制系统设计(二)
3.2 全桥驱动电路的逻辑控制电路 换相控制逻辑包括根据当前转子的位置控制电桥上下桥臂,正确给出绕
组通电;通过对绕组通电的时间比例控制速度;对电桥实施死区保护,防止烧毁MOSFET和驱动电路.所以设计
的逻辑控制电路具有以下特点:采用逻辑门电路与RC延时电路,避免了控制时出现死区;另外增加了电机绕组
续流功能,保护了控制管.两个电机的电桥逻辑控制电路一样,这里给出了其中一路,如图5所示. 3.3 霍尔
位置传感器接口电路 无刷电机内置的三个位置传感器(霍尔)采用5V电源供电,由于电机内部电磁场的作
用以及工作时的干扰,对霍尔位置传感器及其电路的电源要求非常高,这里我们采用独立电源
3.2 全桥驱动电路的逻辑控制电路
换相控制逻辑包括根据当前转子的位置控制电桥上下桥臂,正确给出绕组通电;通过对绕组通电的时间比例控制速度;对
电桥实施死区保护,防止烧毁MOSFET和驱动电路.所以设计的逻辑控制电路具有以下特点:采用逻辑门电路与RC延时电路,
避免了控制时出现死区;另外增加了电机绕组续流功能,保护了控制管.两个电机的电桥逻辑控制电路一样,这里给出了其中
一路,如图5所示.
3.3 霍尔位置传感器接口电路
无刷电机内置的三个位置传感器(霍尔)采用5V电源供电,由于电机内部电磁场的作用以及工作时的干扰,对霍尔位置
传感器及其电路的电源要求非常高,这里我们采用独立电源供电,此外对传感器脉冲检测电路进行了滤波处理(同时在软件中
也做了相应的处理),以提高抗干扰能力,这里图6霍尔位置传感器接口电路仅画出其中一路,具体电路如图6所示.
下载后可阅读完整内容,剩余3页未读,立即下载
相关推荐


weixin_38669881
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开








最新资源
- 解析挂载裸设备失败与磁盘空间不足问题
- 网页式HTML帮助文档的创建与应用
- Sawan-honda-Eslo: 创新本田管理系统解决方案
- JavaWeb实现的个人通讯录系统管理与备份
- 液晶屏程序升级教程及工具下载
- 2410系统功能及ADS工程测试综述
- Python实现半监督端到端场景文字识别
- VC++课程设计:简易音乐播放器软件开发
- JavaScript环境下NIC的使用与实践
- 深入理解Spring框架与AOP事务及集成应用
- Android平台展示FlatBuffers实例的应用开发示例
- Jive论坛1.2.4版:开源时代的快速反应论坛系统
- 惠普6325笔记本拆解指南及详细步骤
- 单片机开发者必备工具软件及算法集合
- businessSkin8.26:Delphi与C++Builder的Ribbon菜单增强
- QM客服系统:Windows平台下的全桌面在线支持解决方案
