LPC2132驱动的双驱电动车控制:逻辑电路与传感器设计
PDF格式 | 244KB |
更新于2024-08-31
| 121 浏览量 | 举报
在汽车电子设计中,本文详细探讨了基于LPC2132的双驱电动车控制系统的关键部分。首先,3.2节重点介绍了全桥驱动电路的逻辑控制电路。这个电路的核心在于换相控制逻辑,它依赖于转子位置信息来精确控制电桥的上下桥臂,确保绕组按需通电。通过时间比例控制,实现了电机速度的精细调整。为了保护电路元件,尤其是MOSFET和驱动电路,逻辑控制电路引入了逻辑门和RC延时电路,防止出现死区效应,并增加了电机绕组的续流功能,有效保护了控制管。
接着,3.3节涉及霍尔位置传感器接口电路的设计。无刷电机内部的霍尔传感器对电源质量和抗干扰性能要求极高,因此采用了独立的5V电源供应,并对传感器信号进行了滤波处理,增强了其抗干扰能力。图6展示了详细的接口电路设计。
3.4节阐述了电桥驱动电路的设计,采用IR2103专用驱动芯片,确保了每个相的上、下桥臂控制的准确性,同时考虑到电机工作电流大,解决了死区保护问题。
软件设计是控制系统的重要组成部分,4.1节提到的控制软件包括多个模块:位置检测模块用于实时监控电机状态,换相逻辑控制模块确保电机正确换向,速度调节模块则负责转速采样、PWM控制(正反转)以及PID控制等,以实现电动汽车的智能化管理。
这篇文章深入剖析了基于LPC2132的双驱电动车控制系统的关键技术细节,从硬件电路设计到软件算法,全面展示了系统如何通过精确控制和高效防护确保电动车的稳定运行。
汽车电子中的基于汽车电子中的基于LPC2132的双驱电动车控制系统设计(二)的双驱电动车控制系统设计(二)
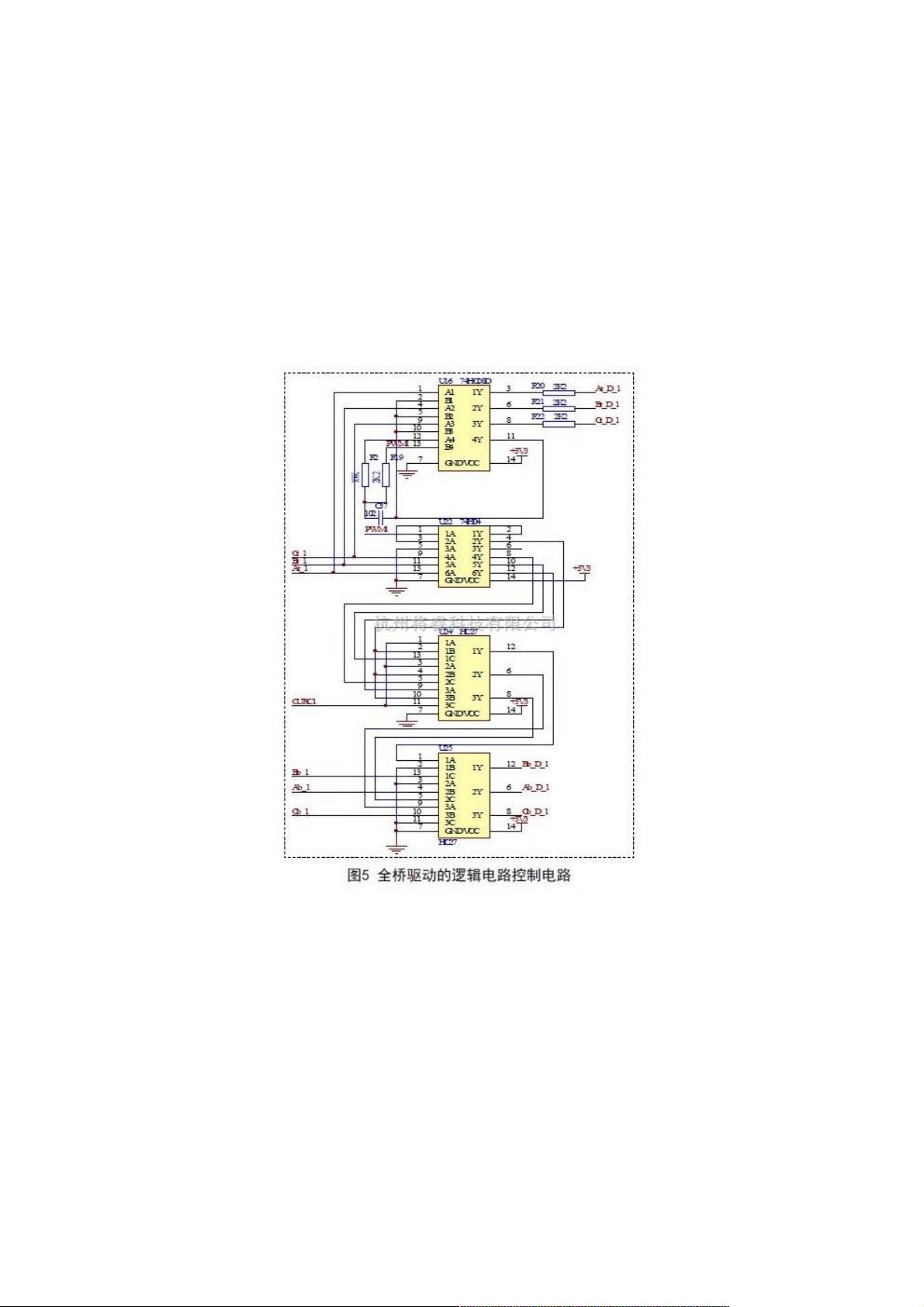
3.2 全桥驱动电路的逻辑控制电路 换相控制逻辑包括根据当前转子的位置控制电桥上下桥臂,正确给出绕
组通电;通过对绕组通电的时间比例控制速度;对电桥实施死区保护,防止烧毁MOSFET和驱动电路.所以设计
的逻辑控制电路具有以下特点:采用逻辑门电路与RC延时电路,避免了控制时出现死区;另外增加了电机绕组
续流功能,保护了控制管.两个电机的电桥逻辑控制电路一样,这里给出了其中一路,如图5所示. 3.3 霍尔
位置传感器接口电路 无刷电机内置的三个位置传感器(霍尔)采用5V电源供电,由于电机内部电磁场的作
用以及工作时的干扰,对霍尔位置传感器及其电路的电源要求非常高,这里我们采用独立电源
3.2 全桥驱动电路的逻辑控制电路
换相控制逻辑包括根据当前转子的位置控制电桥上下桥臂,正确给出绕组通电;通过对绕组通电的时间比例控制速度;对
电桥实施死区保护,防止烧毁MOSFET和驱动电路.所以设计的逻辑控制电路具有以下特点:采用逻辑门电路与RC延时电路,
避免了控制时出现死区;另外增加了电机绕组续流功能,保护了控制管.两个电机的电桥逻辑控制电路一样,这里给出了其中
一路,如图5所示.
3.3 霍尔位置传感器接口电路
无刷电机内置的三个位置传感器(霍尔)采用5V电源供电,由于电机内部电磁场的作用以及工作时的干扰,对霍尔位置
传感器及其电路的电源要求非常高,这里我们采用独立电源供电,此外对传感器脉冲检测电路进行了滤波处理(同时在软件中
也做了相应的处理),以提高抗干扰能力,这里图6霍尔位置传感器接口电路仅画出其中一路,具体电路如图6所示.
下载后可阅读完整内容,剩余3页未读,立即下载
相关推荐
103 浏览量
199 浏览量
162 浏览量
2020-08-28 上传
110 浏览量
110 浏览量
2025-04-28 上传

weixin_38590996
- 粉丝: 8
 我的内容管理
展开
我的内容管理
展开








最新资源
- Xftp 5绿色版:轻松实现Windows与UNIX/Linux间文件传输
- 脉冲压缩技术在雷达定位中的应用与chirp信号设计
- PDF文件读写操作的Java库:pdfBox1.8.14使用详解
- 掌握idea及其2017版的使用方法
- 深入探究重庆大学信号与系统课程学习资料
- 免费全能型博客系统:构建多功能网站的高效选择
- VS完全卸载工具:彻底清理Visual Studio残留
- Unity3D换装功能实现教程与资源文件
- Laravel API骨架开发实践指南
- 串口与TCP指令测试工具的使用与下载指南
- C语言在Linux下的重定位技巧解析
- 图像处理在汽车车牌识别中的应用研究
- STM32控制OLED屏幕菜单滚屏显示SPI驱动实现
- 语音合成软件2.0实现逼真真人语音效果
- 链栈实现进制转换与逆波兰表达式求解
- Laravel开发新领域:在Symfony2中实现illuminate-bundle集成











