最小二乘法与多项式拟合原理解析
需积分: 7 118 浏览量
更新于2024-09-13
收藏 166KB DOC 举报
本文主要介绍了最小二乘法的基本原理及其在多项式拟合中的应用。最小二乘法是一种常见的数据拟合方法,通过最小化误差平方和来寻找最佳拟合曲线。这种方法在处理实际问题时具有较高的计算效率和实用性。
一、最小二乘法的基本原理
最小二乘法的核心思想是找到一个函数,使得该函数与给定数据点之间的误差平方和最小。误差平方和是指每个数据点到拟合曲线距离的平方和。在数学表达式中,如果给定数据点 (x_i, y_i) (i=0,1,...,m),拟合函数为 f(x),则误差平方和 E 可以表示为:
\[ E = \sum_{i=0}^{m}(f(x_i) - y_i)^2 \]
在曲线拟合中,通常选择误差平方和作为衡量拟合优度的标准,因为它便于进行微分运算,有助于求解极值问题。
二、多项式拟合
多项式拟合是利用次数不超过 n 的多项式来逼近给定的数据点。对于数据点 (x_i, y_i),目标是找到一个 n 次多项式 f(x) = p_n(x) + p_{n-1}(x) + ... + p_1(x) + p_0,其中 p_k 是 x 的 k 次幂的系数,使得误差平方和最小。
当 n=1 时,多项式拟合简化为线性拟合,即直线拟合。对于一般情况,我们可以将拟合问题转化为求解多元函数的极值问题。通过建立多元函数的偏导数为零的条件,可以得到一组关于多项式系数的线性方程组,即正规方程组(法方程组):
\[ \sum_{i=0}^{m}x_i^k y_i = \sum_{i=0}^{m}x_i^k p_j(x_i), \quad j=0,1,...,n \]
这个方程组的系数矩阵是对称正定的,因此存在唯一的解。解出这个方程组,就可以得到拟合多项式 p_n(x) 至 p_0(x) 的系数,从而构建出拟合多项式 f(x)。
三、最小二乘拟合多项式的平方误差
拟合多项式 f(x) 的平方误差定义为所有数据点误差平方的平均值,表示为:
\[ \bar{E} = \frac{1}{m+1}\sum_{i=0}^{m}(f(x_i) - y_i)^2 \]
平方误差提供了评估拟合质量的指标,越小说明拟合效果越好。
总结来说,最小二乘法通过最小化误差平方和来确定最佳拟合曲线,尤其在多项式拟合中,通过解决正规方程组找到拟合多项式的系数,从而实现对数据的精确描述。这种方法在数据分析、工程建模等领域有着广泛的应用。
第一节 最小二乘法的基本原理和多项式拟合
一 最小二乘法的基本原理
从整体上考虑近似函数
)(xp
同所给数据点
),(
ii
yx
(i=0,1,…,m)误差
iii
yxpr )(
(i=0,1,…,m)的大小,常用的方法有以下三种:一是误差
iii
yxpr )(
(i=0,1,
…,m)绝对值的最大值
i
mi
r
0
max
,即误差 向量
T
m
rrrr ),,(
10
的∞—范数;二是误
差绝对值的和
m
i
i
r
0
,即误差向量 r 的 1—范数;三是误差平方和
m
i
i
r
0
2
的算术平
方根,即误差向量 r 的 2—范数;前两种方法简单、自然,但不便于微分运算 ,
后一种方法相当于考虑 2—范数的平方,因此在曲线拟合中常采用误差平方和
m
i
i
r
0
2
来 度量误差
i
r
(i=0,1,…,m)的整体大小。
数据拟合的具体作法是:对给定数据
),(
ii
yx
(i=0,1,…,m),在取定的函
数类
中,求
)(xp
,使误差
iii
yxpr )(
(i=0,1,…,m)的平方和最小,即
m
i
i
r
0
2
=
m
i
ii
yxp
0
2
min)(
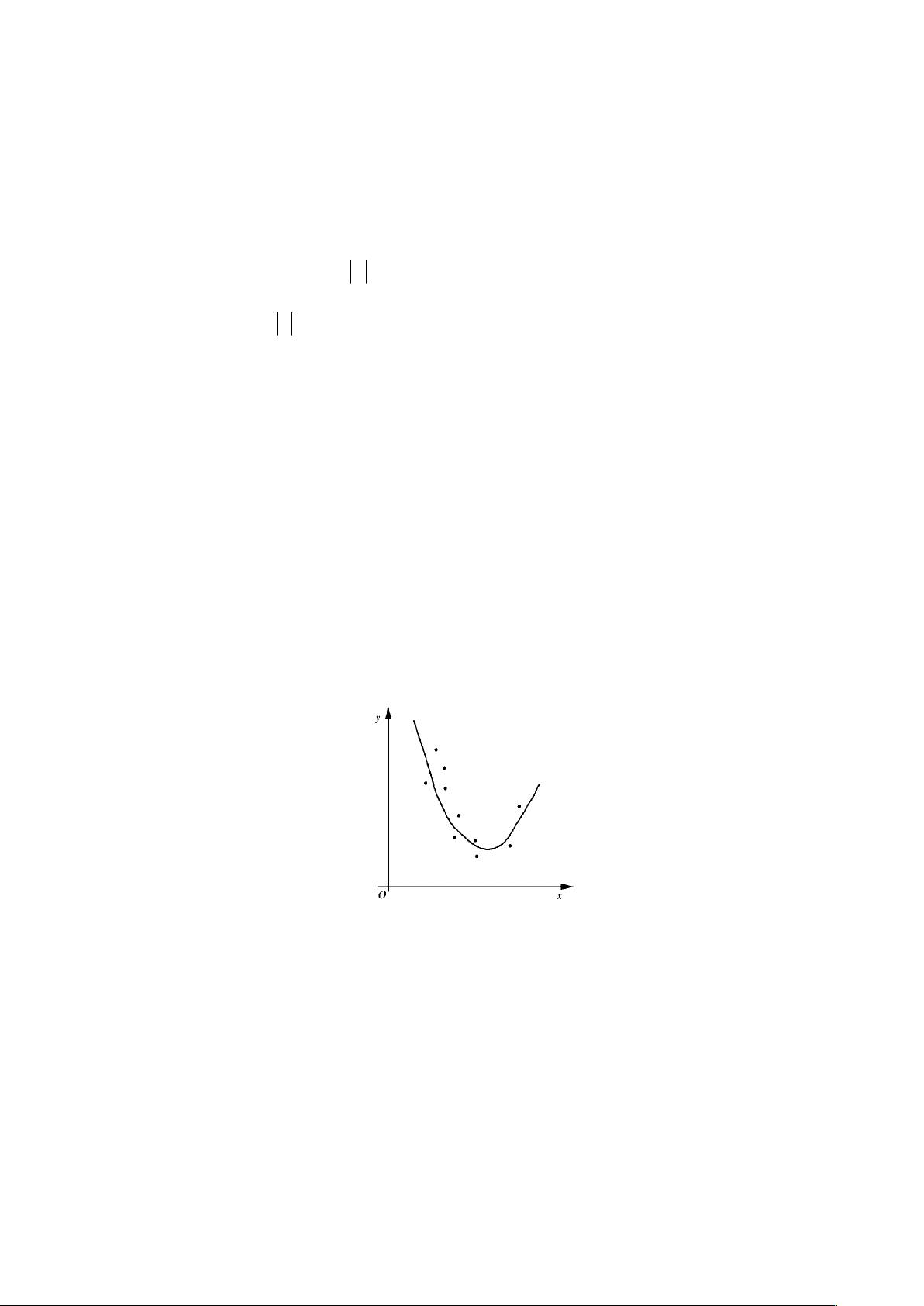
从几何意义上讲,就是寻求与给定点
),(
ii
yx
(i=0,1,…,m)的距离平方和为最
小的曲线
)(xpy
(图 6-1)。函数
)(xp
称为拟合 函数或最小二
乘解,求拟合函数
)(xp
的方法称为曲线拟合的最小二乘法。
在曲线拟合中,函数类
可有不同的选取方法.
6—1
二 多项式拟合
假设给定数据点
),(
ii
yx
(i=0,1,…,m),
为所有次数不超过
)( mnn
的多项式构
成的函数类,现求一
n
k
k
kn
xaxp
0
)(
,使得
min)(
0 0
2
0
2
m
i
m
i
n
k
i
k
ikiin
yxayxpI
(1)
当拟合函数为多项式时,称为多项式拟合,满足式(1)的
)(xp
n
称为最小二乘
拟合多项式。特别地,当 n=1 时,称为线性拟合或直线拟合。
下载后可阅读完整内容,剩余6页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-10-03 上传
1733 浏览量
2022-05-22 上传
2013-07-01 上传
2022-11-03 上传
2020-08-07 上传

lishuai2010
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 应用数据科学峰会第5周
- xml2ddl:隐秘xml到ddl文件
- Dipterv_KNX:他正在康复
- 企业手机微网站模板
- 电信设备-基于相似度的多模态信息分类贡献差异性计算方法.zip
- piero:节点事件管理包
- SALIENT-EDGE-S-and-REGION-S-EXTRACTIONFOR-RGBD-IMAGES
- c是最好的编程语言之C语言实现的数独游戏.zip
- 神经网络算法:神经网络算法(包括BP,SOM,RBF)
- naive-bayes-author-email:电子邮件作者的机器学习
- Mochila_De_Mollein_M_Florencia:Cursada de“Introduccióna laInformática”(认证技术开发人员)
- rf:Go的重构工具
- onkormanyzati-adatbazis-parser:töosz.huönkormányzatiadatbázisadatoksajátadatbázisbamentéséreszántkód
- 焊缝检测PLC程序.rar
- shark_tooth_data_collector:使用OpenCV进行鲨鱼牙齿的圆形测量
- 易语言-新浪微博登录发微博
