"SimulinkS-Function倒立摆仿真与实时控制研究"
版权申诉
"Based on the research of SimulinkS-Function inverted pendulum simulation and real-time control (new).pdf, this paper provides an overview of the background and current development of the inverted pendulum control system. The physical structure of the second-order linear inverted pendulum system is studied, and the mathematical model of the system is established using the Lagrange equation. The mathematical model is linearized at the equilibrium position to obtain the linear state space equation of the inverted pendulum system. The stability and controllability of the system are analyzed.
Furthermore, the research includes pole placement and LQR control theory, and designs pole placement controller and LQR controller for the second-order inverted pendulum system. The Simulink platform of Matlab software is used to simulate the inverted pendulum model and the controller. By adjusting the parameters, the inverted pendulum is balanced. Finally, a controller S-Function is written in C language for real-time control of the inverted pendulum.
In summary, the inverted pendulum is a typical control object with characteristics such as instability, high order, multivariable, and strong coupling. The research in this paper provides a comprehensive analysis of the system's physical structure, mathematical model, linear state space equation, stability, and controllability. In addition, it explores the application of pole placement and LQR control theory in designing controllers for the inverted pendulum system. The simulation and real-time control experiments demonstrate the effectiveness of the controllers in balancing the inverted pendulum.
Keywords: Inverted pendulum; pole placement; LQR; S-Function"

6、遗传算法:以要寻优的参数组成染色体,通过模拟生物从父代到子代,再从子代到
孙代,不断地进化演变的过程来进行迭代求解的。其模拟生物界优胜劣汰的进化过程来实现
参数的寻优。
7、云模型控制:用云模型构成语言值,用语言值构成规则,形成一种定性的推理机制。
这种方法不要求给出对象的精确数学模型,而仅依据人的经验、感受和逻辑判断,将人用自
然语言表达的控制经验,通过语言原子和云模型转换到语言控制规则器中,就能解决非线性
问题和不确定性问题。
8、拟人智能控制:不需要了解被控对象的数学模型,凭借人的知识与直觉经验并借助
计算机快速模拟制经验,把人的思维中的定性分析与控制理论中的定量计算相互结合,从而
实现对倒立摆的控制。
9、几种控制算法相结合的控制方式:充分利用各控制算法的优越性,来实现一种组合
式的控制方法,如遗传算法与神经网络结合的方法,神经网络与模糊理论结合的方法,模糊
控制与 PID 结合的方法等等。
1.4 本文研究的主要内容及本文思路
二级倒立摆实质上是一个高阶次、不稳定、多变量、非线性、强耦合系统,理论上可
以用经典控制理论和线性系统理论以及智能控制理论等来设计控制律,但经典控制理论对高
阶问题的解决总是不理想。然而在作了一系列假设的情况下,可把二级倒立摆看成是线性系
统,从而使用线性系统理论对其进行控制。
本文研究的主要内容有:以二级倒立摆系统为研究对象,依靠极点配置和 LQR 控制的
理论依据,实验平台上依托 Matlab 强大的数值计算及其中 Simulink 仿真功能,完成控制系
统模型分析、控制器设计和仿真研究。
全文共分为五章:
第 1 章:倒立摆系统概述、介绍了倒立摆系统研究背景和意义,研究现状,当前倒立
摆的控制方法及本文思路。
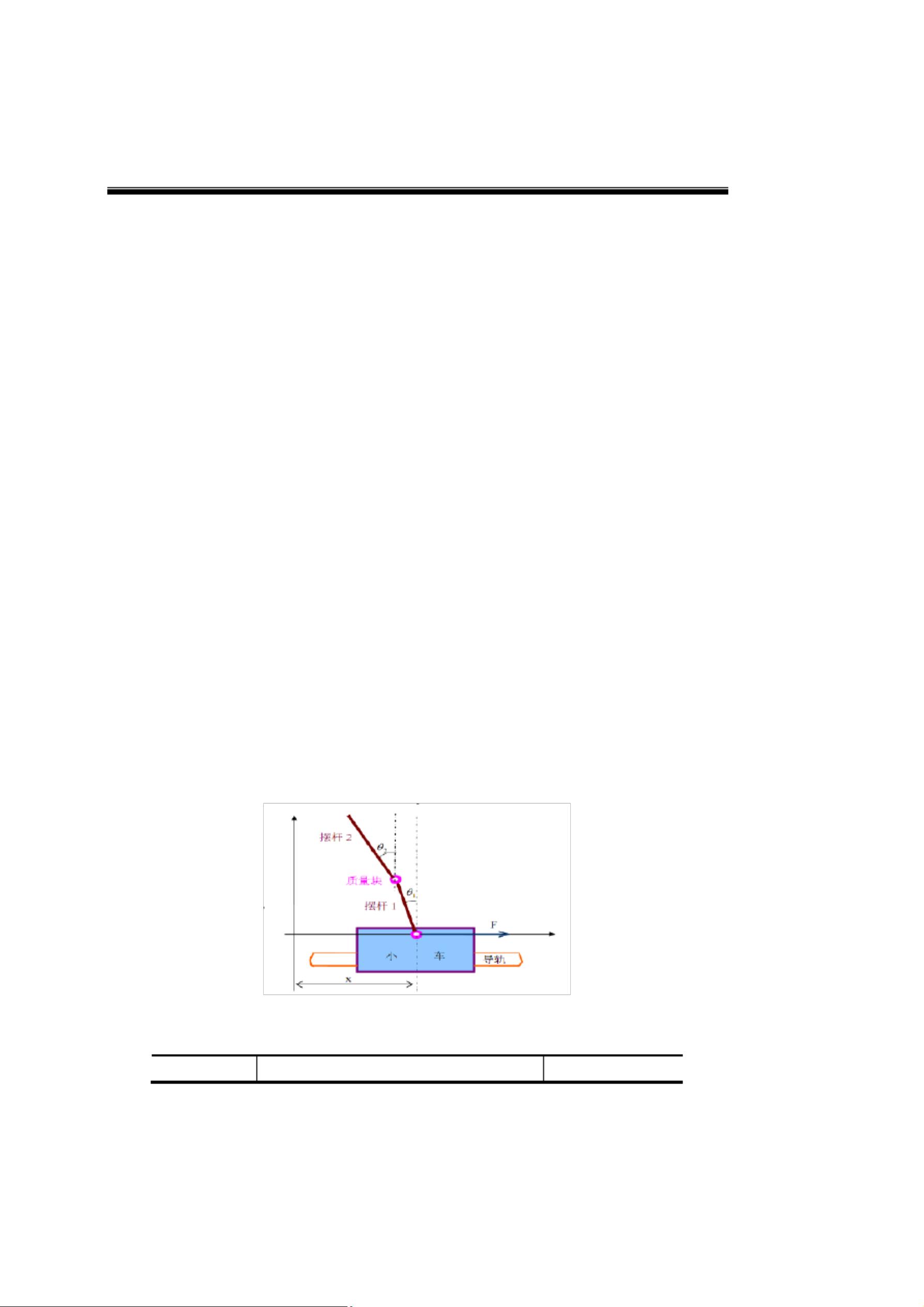
第2章:介绍二级直线式倒立摆的物理结构,并采用牛顿运动方程和拉格
朗日方程对其数学模型进行了推导。然后对系统在平衡位置进行了线性化,
建立了系统的线性状态空间方程,并简单分析了二级倒立摆系统的能控性、
能观性和稳定性。
第3章:介绍极点配置相关理论知识,设计极点配置控制器,借助Matlab
中的Simulink框图利用设计的控制器对二级倒立摆的模型进行仿真,得到理
想的仿真曲线。
6

剩余57页未读,继续阅读
145 浏览量
115 浏览量
134 浏览量
2021-11-03 上传
2024-10-26 上传
2021-09-14 上传
242 浏览量
332 浏览量

G11176593
- 粉丝: 6929
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#语言规范3.0版详解
- C/C++指针解析:从基础到复杂类型
- C++编程规范与实践:构造、析构与赋值函数解析
- Linux网络配置利器:ip命令详解
- Linux命令手册:文件操作与系统管理
- Quidway S8016路由器交换机培训:VLAN与端口聚合、镜像详解
- Linux新手管理员入门全攻略
- Linux内核0.11完全注释解析
- Ubuntu部落:Linux入门与系统深度探索
- C语言实现DOS环境下文字编辑器源代码
- 中国联通客户咨询中心系统后台设置模块开发
- 红旗Linux桌面6.0安装与入门指南
- GSM网络与3G位置更新详解
- 幽默解读软件工程:实践与人生智慧
- 计算机网络原版第三版:互联网的深入探索
- Java性能优化策略汇总:无new实例与非阻塞IO等实用技巧
