Python实现相机标定:张正友棋盘格法详解
版权申诉
"本文主要介绍了如何使用Python实现张正友棋盘格标定法来校正相机的图像畸变,包括原理、环境设置、代码实现、实验结果与分析以及问题解决。"
在计算机视觉领域,相机标定是纠正图像畸变、获取相机内参数的关键步骤。张正友棋盘格标定法是一种常用且有效的标定方法,主要用于校正相机的径向畸变和切向畸变,从而提高图像的精度。
1. 原理
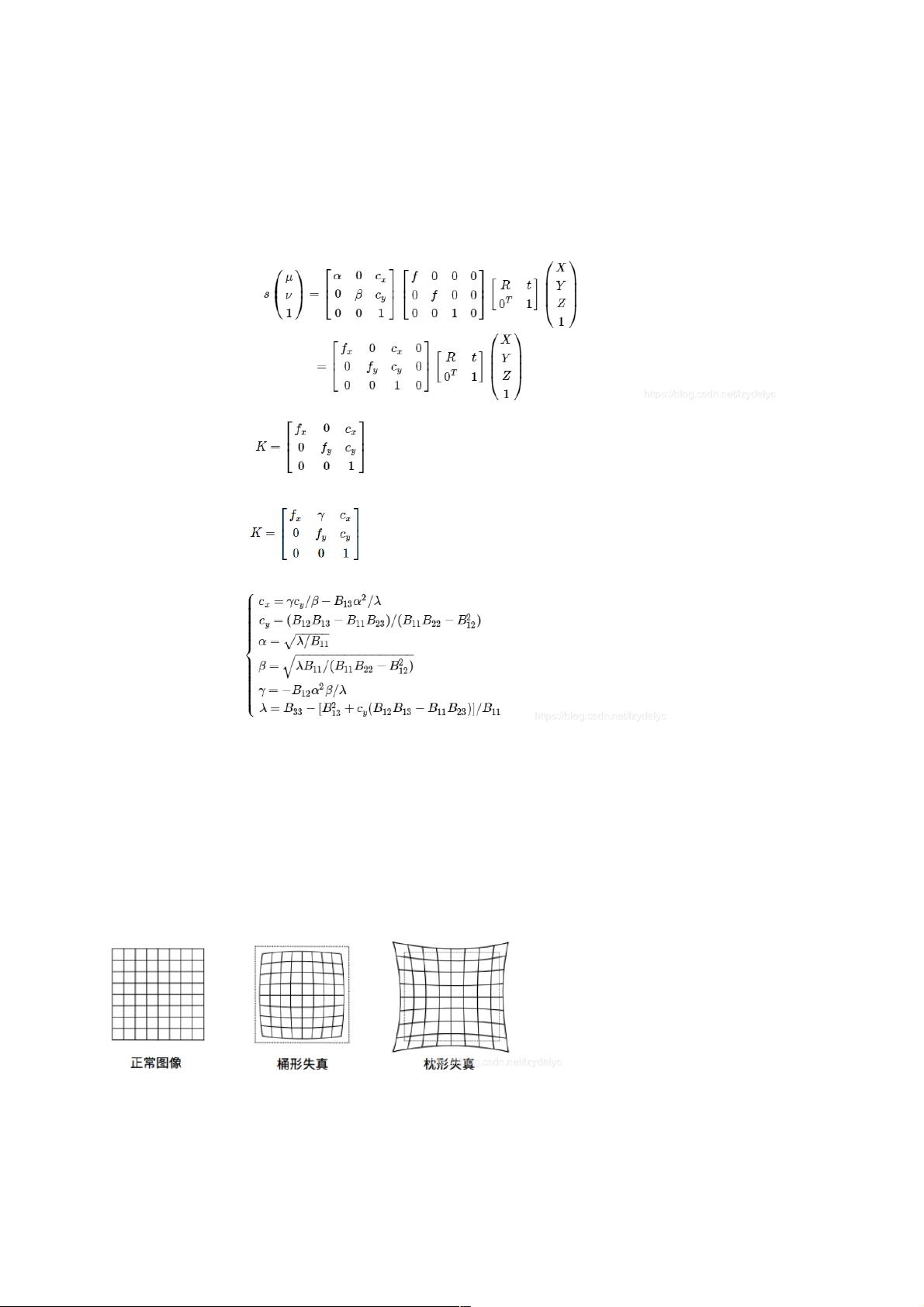
相机的内参数描述了相机本身的特性,包括焦距、主点位置以及可能存在的像素坐标轴扭曲。相机的外参数则涉及到相机相对于世界的姿态,即旋转和平移。针孔相机模型下,三维点P通过一系列变换投射到二维图像上,这个过程中涉及的内参数矩阵K包含了焦距和像素尺度等信息。
张氏标定法主要包括以下步骤:
1.1 准备带有棋盘格图案的标定板,通常为正交排列的黑白方格。
1.2 捕捉不同角度和位置的标定板图像,提取每个图像中的棋盘角点。
1.3 使用亚像素级算法精确确定角点位置。
1.4 将所有角点信息输入标定算法,计算相机的内参数和外参数。
1.5 评估标定结果,并用校正后的参数对新图像进行畸变校正。
1.3 径向畸变和切向畸变是相机成像时常见的问题。径向畸变是由透镜的非理想形状导致的,表现为图像边缘的桶形或枕形变形。切向畸变则是由于镜头不平行于图像传感器引起的。校正这些畸变通常通过牛顿-拉弗森迭代法或者Brown-Conrady模型来实现。
2. 环境与代码
实施这个标定过程通常需要Python环境,例如Python 2.7,以及图像处理库如OpenCV。在PyCharm等IDE中编写和运行代码,可以方便地进行图像读取、角点检测、标定计算和结果展示。
3. 实验结果与分析
实验中会展示角点检测的准确性、内参数计算的矩阵截图以及外参数(相机位姿)的结果。通过对标定后的棋盘图进行矫正,可以直观地看到畸变校正的效果。
4. 遇到的问题及解决方法
在标定过程中可能遇到的问题包括角点检测不准确、标定图片数量不足或多样性不够、计算误差等。解决这些问题可能需要调整角点检测算法的参数、增加标定图片的多样性、优化标定算法或检查硬件设置。
Python实现张正友棋盘格标定法是解决相机图像畸变的有效手段,它可以帮助我们获取相机的内参数,从而在后续的计算机视觉应用中提供更准确的图像数据。通过理解这一方法,我们可以更好地理解和改进相机的成像质量。
python实现张正友棋盘格标定法实现张正友棋盘格标定法
文章目录文章目录1.原理1.1相机的内参数1.2张氏标定法1.3切向畸变与径向畸变2.环境与代码2.1棋盘环境2.2图片选取2.3代码3.实验结果与分析3.1角点检测结果3.2内参结果截图3.3外参结果
截图3.4小结4.遇到的问题及解决方法
1.原理原理
**
1.1相机的内参数相机的内参数
**
设P=(X,Y,Z)为场景中的一点,在针孔相机模型中,其要经过以下几个变换,最终变为二维图像上的像点p=(μ,ν):
将P从世界坐标系通过刚体变换(旋转和平移)变换到相机坐标系,这个变换过程使用的是相机间的相对位姿,也就是相机的外参数。
从相机坐标系,通过透视投影变换到相机的成像平面上的像点p=(x,y)。
将像点p从成像坐标系,通过缩放和平移变换到像素坐标系上点p=(μ,ν)。
相机将场景中的三维点变换为图像中的二维点,也就是各个坐标系变换的组合,可将上面的变换过程整理为矩阵相乘的形式:
将矩阵K称为相机的内参数,
其中,α,β表示图像上单位距离上像素的个数,则fx=αf,fy=βf将相机的焦距f变换为在x,y方向上像素度量表示。
另外,为了不失一般性,可以在相机的内参矩阵上添加一个扭曲参数γ,该参数用来表示像素坐标系两个坐标轴的扭曲。则内参数K变为
最后可以得到相机的各个内参数:
1.2张氏标定法张氏标定法
1.准备标定图片
2.对每一张标定图片,提取角点信息
3.对每一张标定图片,进一步提取亚像素角点信息
4.在棋盘标定图上绘制找到的内角点(非必须,仅为了显示)
5.相机标定
6.对标定结果进行评价
7.查看标定效果——利用标定结果对棋盘图进行矫正
1.3切向畸变与径向畸变切向畸变与径向畸变
径向畸变:这是由于透镜先天条件原因(透镜形状),成像仪中心(光学中心)的畸变为0,随着向边缘移动,畸变越厉害。这里有3个参数,k1,k2,k3其中k3是可选参数。
切向畸变:这是摄像机安装过程造成的,如当透镜不完全平行于图像平面的时候产生的。
如何消除径向畸变径向畸变呢?
在小孔模型中,一条指向在成像平面上的像仍然是直线。但是在实际拍摄的过程中,由于透镜的存在,往往将一条直线投影成了曲线,越靠近图像的边缘,这种现象越明显。透镜往
往是中心对称的,使得这种不规则的畸变通常是径向对称的。主要有两大类:桶形畸变和枕形畸变。如下图
2.环境与代码环境与代码
2.1棋盘环境棋盘环境
运行环境:pyhton2.7、pycharm编译器
测试条件:手机拍照(图像16张)、手机型号华为P30
2.2图片选取图片选取
1.制作标定使用标定板。
2.可以将其打印下来固定到一张平板上就是标定使用的标定板,也可以投放到平板上选一个光线较暗不会有倒影的环境进行对平板进行拍摄。 使用同一相机从不同的位置,不同的角
度,不同的姿态,拍摄标定板的多张照片(10-20张,这里选用了12张)
下载后可阅读完整内容,剩余4页未读,立即下载
2019-04-14 上传
349 浏览量
2016-04-18 上传
点击了解资源详情
点击了解资源详情
2022-09-19 上传

weixin_38746515
- 粉丝: 15
- 资源: 945
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
