ROS与SICK TIM561激光雷达的连接教程
需积分: 9 49 浏览量
更新于2024-09-09
收藏 3.28MB DOCX 举报
"这篇文档介绍了如何将SICK的TIM561激光雷达连接到ROS系统,以便在RVIZ中查看点云图像。SOPAS软件用于配置激光雷达的IP和RSSI,然后调整电脑IP与雷达在同一网段,最后通过ROS的驱动库建立连接。"
在连接SICK的TIM561激光雷达到ROS系统之前,首先需要了解SOPAS软件的作用。SOPAS是SICK公司提供的工具,用于监控、调试和配置包括TIM561在内的设备。尽管它不支持Ubuntu环境,但可以通过它来设置TIM561的IP地址(例如,设置为169.254.66.113,子网掩码255.255.0.0),并开启RSSI功能。确保IP地址与电脑在同一网段且不重复,登录时使用默认的用户名和密码(client)。
接下来,要使电脑与TIM561通信,需要将电脑的IP地址也设置为手动,并且与TIM561在同一网段。这通常在系统的网络设置中完成,选择有线连接的IPv4设置,改为手动输入IP和子网掩码。
连接ROS与TIM561的关键步骤是安装ROS的驱动库。这可以通过在终端中运行`sudo git clone http://github.com/uos/sick_tim.git`来实现,然后将库添加到ROS工作空间。由于TIM561的驱动可能未直接支持,可以使用(TIM551的驱动作为替代。这涉及到修改launch文件的所有权,使其可由当前用户编辑(例如,使用命令`sudo chown -R xghaosick_tim`,将"xghao"替换为实际用户名),并根据需要调整launch文件内容以适应TIM561。
在修改好launch文件后,可以启动ROS节点,运行激光雷达,并在RVIZ中查看点云数据。通过这个过程,开发者可以成功地将TIM561集成到ROS环境中,进行移动机器人或自动化系统的定位和导航任务。这个过程对理解和操作基于ROS的激光雷达系统至关重要,特别是对于那些使用SICK TIM561传感器的开发者来说。
概述:
SICK 的 TIM561 是目前在市面上主流的激光雷达,拥有优越的室外性能以及恰当的扫描
范围该产品在服务机器人,陪护机器人,货到人,跟随机器人等移动机器人市场占有重要
地位,但是网上有各种方法,我进行了实验遇到了各种问题。
一、SOPAS 连接
SOPAS 是西克公司官方发布的一款集监控,调试和参数设置功能为一体的软件,可
以方便的操作 TIM 以及各种参数设置,但是不支 ubuntu 环境,其中 TIM 有的 IP 和 RSSI
通过该软件设定非常容易。所以我通过该软件进行这两项操作。
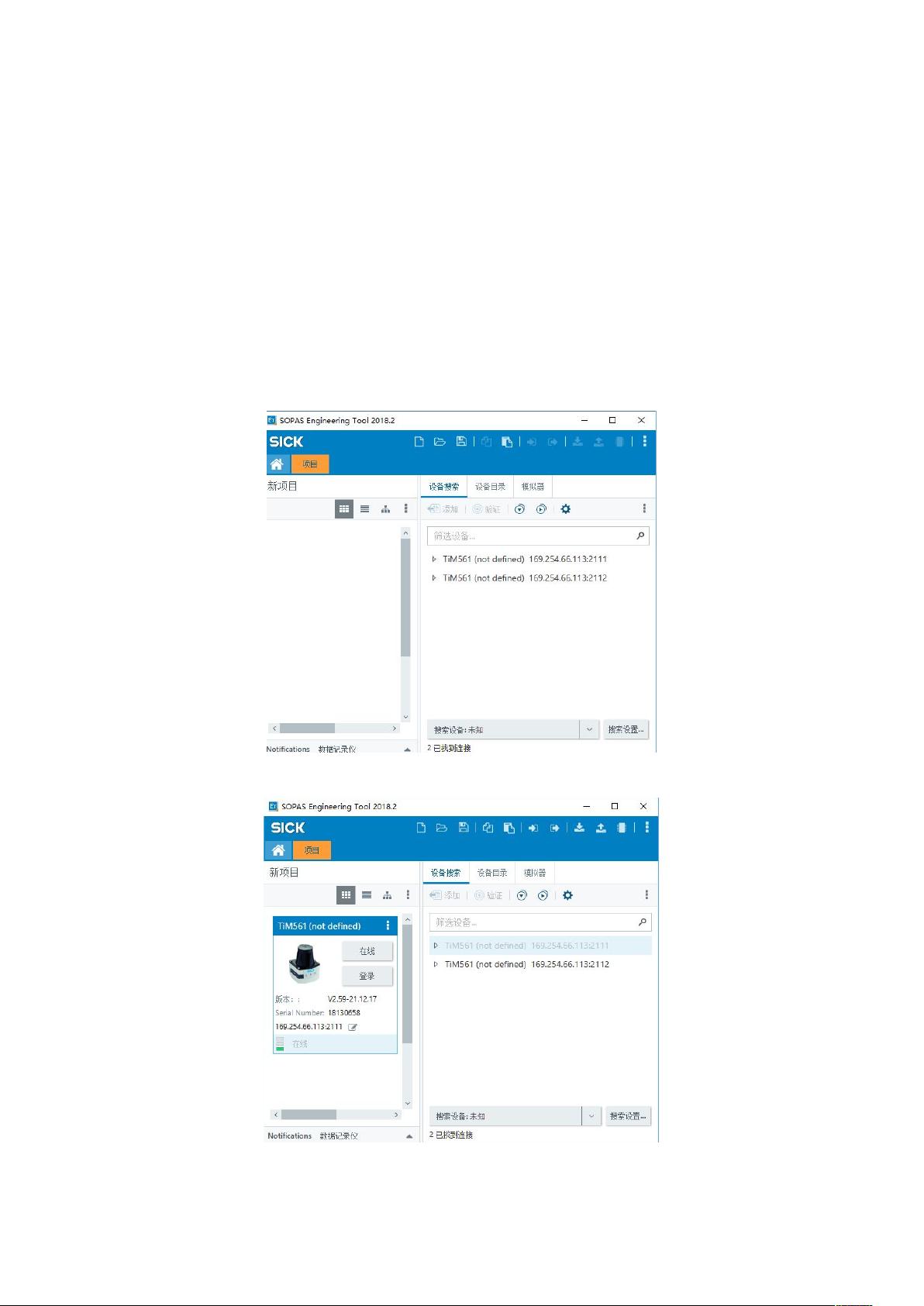
1.搜索设置,找到连接到的设备
2.双击连接设备(sopas 一般选用 2111 端口)
下载后可阅读完整内容,剩余6页未读,立即下载
2010-08-02 上传
2024-07-05 上传
2023-06-08 上传
2023-05-10 上传
2023-09-16 上传
2023-06-09 上传
2024-10-16 上传
2023-05-10 上传

见才亲
- 粉丝: 1
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- StarModAPI: StarMade 模组开发的Java API工具包
- PHP疫情上报管理系统开发与数据库实现详解
- 中秋节特献:明月祝福Flash动画素材
- Java GUI界面RPi-kee_Pilot:RPi-kee专用控制工具
- 电脑端APK信息提取工具APK Messenger功能介绍
- 探索矩阵连乘算法在C++中的应用
- Airflow教程:入门到工作流程创建
- MIP在Matlab中实现黑白图像处理的开源解决方案
- 图像切割感知分组框架:Matlab中的PG-framework实现
- 计算机科学中的经典算法与应用场景解析
- MiniZinc 编译器:高效解决离散优化问题
- MATLAB工具用于测量静态接触角的开源代码解析
- Python网络服务器项目合作指南
- 使用Matlab实现基础水族馆鱼类跟踪的代码解析
- vagga:基于Rust的用户空间容器化开发工具
- PPAP: 多语言支持的PHP邮政地址解析器项目
