VScode配置ROS开发环境详细教程
版权申诉
"这篇教程详细介绍了如何使用Visual Studio Code (VScode) 搭建ROS (Robot Operating System) 开发环境。通过安装必要的插件,如C/C++, CMake, CMakeTools, Code Runner以及ROS插件,VScode可以成为一个强大的ROS集成开发环境。文章以创建一个新的ROS工作空间和发布话题的示例来演示具体步骤。"
在ROS开发中,选择一个合适的开发工具至关重要,VScode由于其灵活性和丰富的插件支持,成为了很多开发者的选择。本教程首先提到了在Ubuntu系统中,传统的vim或gedit编辑器虽然能够编辑代码,但在功能上较为局限,无法提供如函数跳转等便捷的开发功能。因此,作者推荐使用VScode来提升开发效率。
安装VScode后,关键在于安装与ROS开发相关的插件,包括C/C++(用于C++语言的支持),CMake(配合CMake构建系统),CMakeTools(提供CMake的图形化界面),Code Runner(用于快速运行代码)以及ROS (deprecated) 插件,虽然ROS插件已被标记为过时,但在教程发布时可能仍具有一定的实用性。此外,为了适应中文用户,还安装了Chinese插件以提供中文语言支持。
创建ROS工作环境的步骤如下:
1. 新建一个文件夹`test_ros`,并在此文件夹内打开终端。
2. 在终端中执行命令`mkdir src && cd src`,初始化工作空间源代码目录。
3. 使用`catkin_init_workspace`命令创建ROS工作空间。
4. 回到上一级目录,即`test_ros`目录,执行`catkin_make`命令来构建工作空间。
5. 在VScode中打开`test_ros`文件夹。
接着,通过右键点击`src`目录,选择`Create Catkin Package`创建名为`helloworld`的ROS包,并指定`roscpp`和`rospy`作为依赖项。这将自动生成相应的ROS包结构。
在`src/helloworld/src`目录下,创建一个名为`helloworld.cpp`的C++文件,包含基本的ROS节点和话题发布代码。这个简单的程序会周期性地发布字符串消息到`chatter`话题。
通过以上步骤,VScode已经配置好了ROS开发环境,开发者现在可以利用VScode的代码编辑、调试和运行功能进行ROS应用的开发。VScode的强大在于它的可扩展性,可以根据需要安装更多插件以满足特定的开发需求,如代码自动完成、语法高亮、错误检查等,从而提升ROS开发的效率和体验。
使用使用VScode搭建搭建ROS开发环境的教程详解开发环境的教程详解
Enable pretty-printing for gdb
俗话说"工欲善其事必先利其器",之前在Ubuntu上运行的ROS项目都是用vim或者gedit编写和修改代码,然后在终端编译运
行,很不方便,函数跳转查看都没办法实现。所以今天我决定找一个方便的开发工具,也就是找一个像Windows上的VS那样的
集成开发工具(IDE),ROS官网上有一个不同IDE的对比文章,网址在这里
我选择使用VScode.下载安装好VScode后,在扩展栏安装C/C++,CMake,CMake Tools,Code
Runner,ROS(deprecated),Chinese 这些插件.接下来用一个简单的话题发布栗子来演示操作过程
创建创建ROS工作环境工作环境
首先新建一个文件夹,我命名为test_ros,在该文件夹中打开终端,执行以下命令来创建ROS工作环境:
mkdir src && cd src
catkin_init_workspace
cd ../
catkin_make
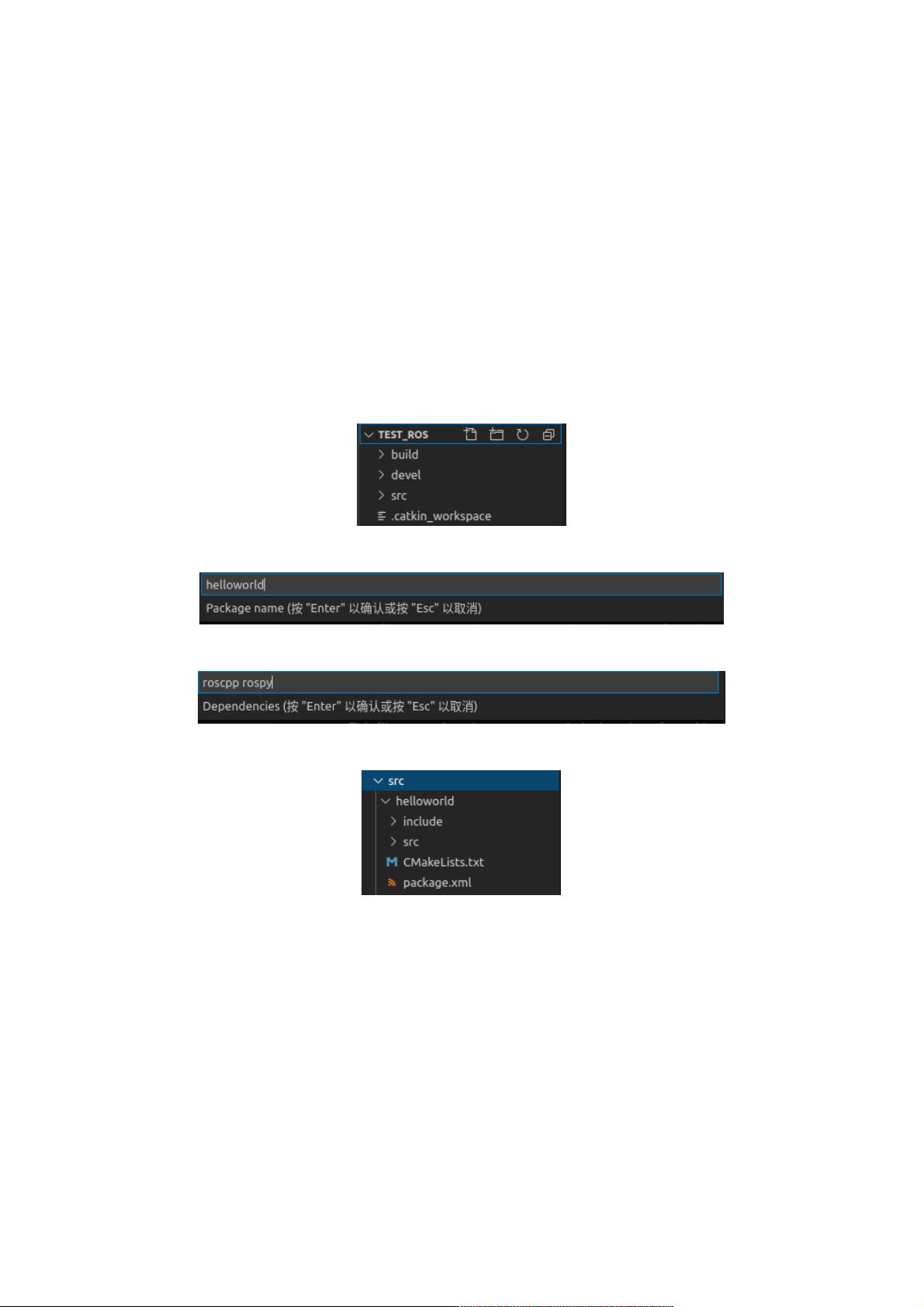
然后在VScode中打开test_ros文件夹,此时的文件目录如下
右键单击src,选择Create Catkin Package ,Package命名为helloworld
添加roscpp, rospy作为依赖项
之后src目录下会出现以下文件:
继续在src/helloworld/src目录下添加一个cpp文件,命名为helloworld.cpp,内容如下:
#include <iostream>
#include <string>
#include <sstream>
using namespace std;
#include "ros/ros.h"
#include "std_msgs/String.h"
int main(int argc, char** argv)
{
ros::init(argc, argv, "talker");
ros::NodeHandle n;
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);
ros::Rate loop_rate(10);
int count = 0;
while(ros::ok())
{
std_msgs::String msg;
std::stringstream ss;
ss << "hello world " << count;
msg.data = ss.str();
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐





weixin_38677260
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 考研英语阅读理解:技巧与策略解析
- iBATIS开发完全指南:从入门到高级特性
- Struts框架详解:构建高效Web应用
- Oracle日志与命令详解:从基础到高级操作
- Office SharePoint Server 2007 图解安装教程
- Oracle9i安装指南:从准备到验证(Windows版)
- 探索BASICStamp:机器人编程入门
- XML详解:从基础到应用全解析
- Ant构建工具入门教程
- 林锐博士的C++/C编程规范指南
- C# 3.0语言规范详解:从基础到高级特性
- Windows环境下安装Linux:Wingrub引导管理器教程
- Oracle 10g PL/SQL指南:10.1版本全面详解
- 混合信号测试基础与实践
- 网上购书系统软件工程详解
- UMLchina-re:业务建模与需求工程探讨
