FlowNet3D:3D点云中的场景流学习与应用
需积分: 11 124 浏览量
更新于2024-09-05
收藏 1.64MB PDF 举报
"FlowNet3D: Learning Scene Flow in 3D Point Clouds是CVPR2019上发表的一篇顶会论文,主要研究如何使用深度神经网络从3D点云数据中估计场景流。文章提出了一个名为FlowNet3D的新颖网络,能以端到端的方式学习点云中的3D运动。网络设计包含两个新的学习层,用于处理点集,以捕捉点云的深层特征和点的运动表示。实验表明,FlowNet3D在FlyingThings3D的挑战性合成数据和实际的KITTI LiDAR扫描数据上表现优秀,即使只在合成数据上训练,也能成功泛化到真实场景,优于多种基线方法并接近现有最优技术。此外,论文还展示了场景流输出在扫描注册和运动分割等应用上的潜力。"
在本文中,作者探讨的关键知识点包括:
1. 场景流(Scene Flow):场景流是指3D环境中点的动态运动,对于机器人导航、人机交互等领域有着重要的应用价值。理解场景流可以帮助系统理解环境的变化和物体的运动。
2. 3D点云处理:不同于传统依赖于立体图像或RGB-D图像的方法,FlowNet3D直接处理3D点云数据。点云作为三维空间中的离散采样,提供了直观且丰富的几何信息,但其无序性和不规则性对处理提出了挑战。
3. 端到端学习(End-to-End Learning):FlowNet3D采用端到端的学习策略,意味着整个模型从输入点云到输出场景流是一个连续的过程,无需中间步骤的手动工程。
4. 深度神经网络设计:FlowNet3D网络包含两个创新的学习层,用于学习点云的深层特征和流动嵌入。这使得网络能够捕捉到点的复杂运动模式。
5. 数据集应用:论文在FlyingThings3D的合成数据和KITTI的LiDAR扫描数据上进行评估。FlyingThings3D提供了复杂的合成场景来测试模型的泛化能力,而KITTI数据集则用于验证模型在真实世界环境中的性能。
6. 泛化能力:FlowNet3D仅在合成数据上训练,但在真实世界的数据上仍表现出色,显示了其强大的泛化能力。
7. 应用示例:论文展示了场景流估计在扫描注册(扫描不同时间点的同一场景并进行对齐)和运动分割(识别运动物体)中的实际应用,证明了这种方法的实用性。
FlowNet3D为3D点云的场景流估计提供了一个有效且具有强大泛化能力的解决方案,对于3D视觉领域的研究和应用具有重要贡献。
FlowNet3D: Learning Scene Flow in 3D Point Clouds
Xingyu Liu
∗1
Charles R. Qi
∗2
Leonidas J. Guibas
1,2
1
Stanford University
2
Facebook AI Research
Abstract
Many applications in robotics and human-computer in-
teraction can benefit from understanding 3D motion of
points in a dynamic environment, widely noted as scene
flow. While most previous methods focus on stereo and
RGB-D images as input, few try to estimate scene flow di-
rectly from point clouds. In this work, we propose a novel
deep neural network named FlowNet3D that learns scene
flow from point clouds in an end-to-end fashion. Our net-
work simultaneously learns deep hierarchical features of
point clouds and flow embeddings that represent point mo-
tions, supported by two newly proposed learning layers for
point sets. We evaluate the network on both challenging
synthetic data from FlyingThings3D and real Lidar scans
from KITTI. Trained on synthetic data only, our network
successfully generalizes to real scans, outperforming vari-
ous baselines and showing competitive results to the prior
art. We also demonstrate two applications of our scene flow
output (scan registration and motion segmentation) to show
its potential wide use cases.
1. Introduction
Scene flow is the 3D motion field of points in the
scene [27]. Its projection to an image plane becomes 2D
optical flow. It is a low-level understanding of a dynamic
environment, without any assumed knowledge of structure
or motion of the scene. With this flexibility, scene flow can
serve many higher level applications. For example, it pro-
vides motion cues for object segmentation, action recogni-
tion, camera pose estimation, or even serve as a regulariza-
tion for other 3D vision problems.
However, for this 3D flow estimation problem, most pre-
vious works rely on 2D representations. They extend meth-
ods for optical flow estimation to stereo or RGB-D images,
and usually estimate optical flow and disparity map sepa-
rately [33, 28, 16], not directly optimizing for 3D scene
flow. These methods cannot be applied to cases where point
clouds are the only input.
Very recently, researchers in the robotics community
started to study scene flow estimation directly in 3D point
* indicates equal contributions.
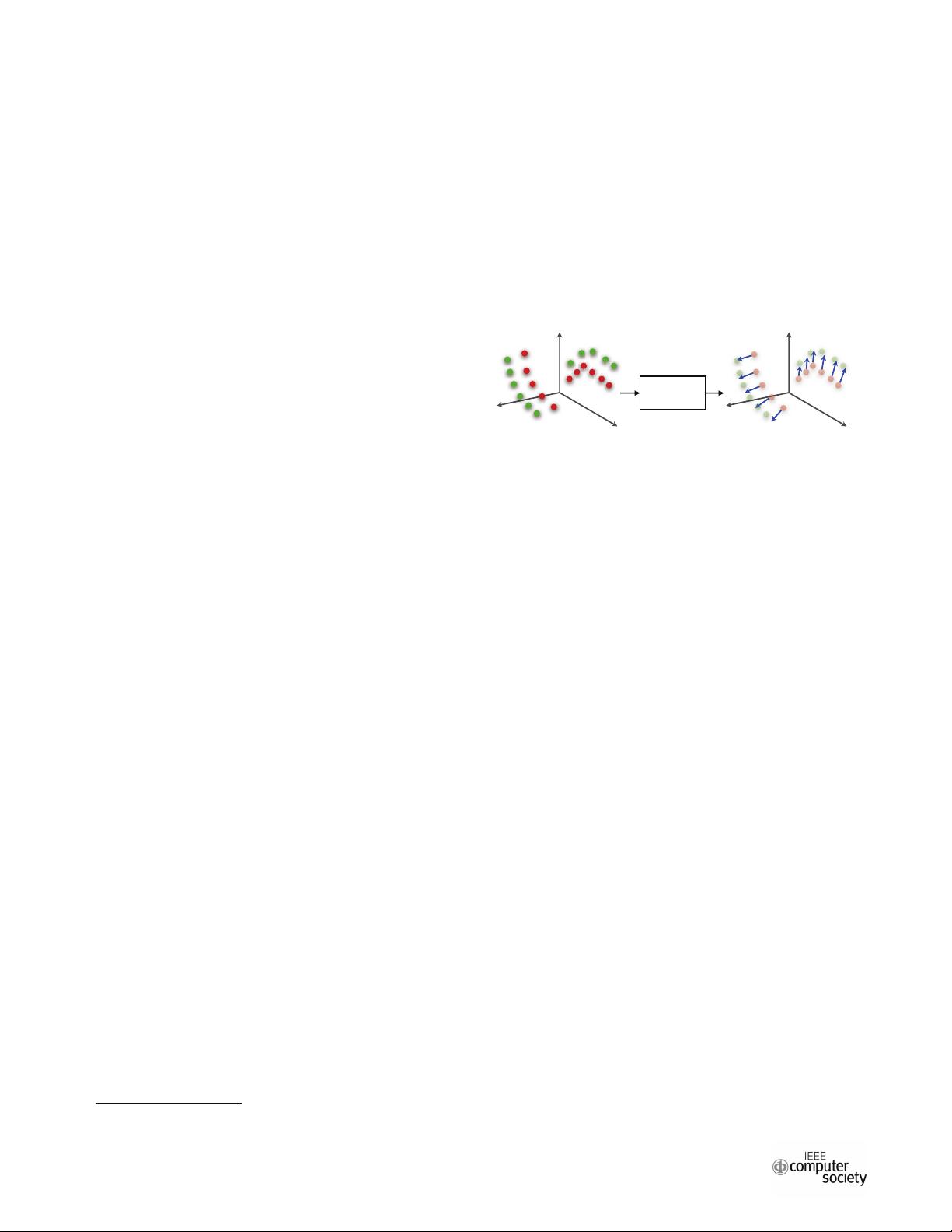
point cloud 1:
point cloud 2:
scene flow:
FlowNet3D
Figure 1: End-to-end scene flow estimation from point
clouds. Our model directly consumes raw point clouds
from two consecutive frames, and outputs dense scene flow
(as translation vectors) for all points in the 1st frame.
clouds (e.g. from Lidar) [7, 25]. But those works did not
benefit from deep learning as they built multi-stage systems
based on hand-crafted features, with simple models such as
logistic regression. There are often many assumptions in-
volved such as assumed scene rigidity or existence of point
correspondences, which make it hard to adapt those systems
to benefit from deep networks. On the other hand, in the
learning domain, Qi et al. [19, 20] recently proposed novel
deep architectures that directly consume point clouds for
3D classification and segmentation. However, their work
focused on processing static point clouds.
In this work, we connect the above two research frontiers
by proposing a deep neural network called FlowNet3D that
learns scene flow in 3D point clouds end-to-end. As illus-
trated in Fig. 1, given input point clouds from two consec-
utive frames (point cloud 1 and point cloud 2), our network
estimates a translational flow vector for every point in the
first frame to indicate its motion between the two frames.
The network, based on the building blocks from [19], is
able to simultaneously learn deep hierarchical features of
point clouds and flow embeddings that represent their mo-
tions. While there are no correspondences between the
two sampled point clouds, our network learns to associate
points from their spatial localities and geometric similar-
ities, through our newly proposed flow embedding layer.
Each output embedding implicitly represents the 3D mo-
tion of a point. From the embeddings, the network further
up-samples and refines them in an informed way through
another novel set upconv layer. Compared to direct feature
529
2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
978-1-7281-3293-8/19/$31.00 ©2019 IEEE
DOI 10.1109/CVPR.2019.00062
下载后可阅读完整内容,剩余8页未读,立即下载
2013-03-14 上传
2020-01-31 上传
2020-07-28 上传
2023-12-29 上传
2020-04-25 上传
2019-01-25 上传

weixin_46235004
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
