江南大学阿福队RoboCup3D:构建仿真足球队的技术探索
下载需积分: 9 | PDF格式 | 237KB |
更新于2024-09-20
| 29 浏览量 | 举报
"这篇文档是关于江南大学阿福队参与RoboCup3D仿真足球比赛的研究论文,探讨了队伍的构建、程序框架设计以及关键模块的实现。"
在RoboCup3D仿真足球比赛中,参赛队伍需要构建一套完整的机器人系统,包括底层架构、决策机制和与比赛服务器的交互等。江南大学阿福队在这个领域积累了丰富的经验,并在2008年的RoboCup中国机器人大赛中取得了显著成绩。
论文首先介绍了RoboCup3D的背景,强调其作为人工智能和机器人技术研究的重要平台。构建有竞争力的球队,需要扎实的底层框架,这包括了机器人世界模型的建立,以及让机器人能够执行复杂的动作和自主决策。
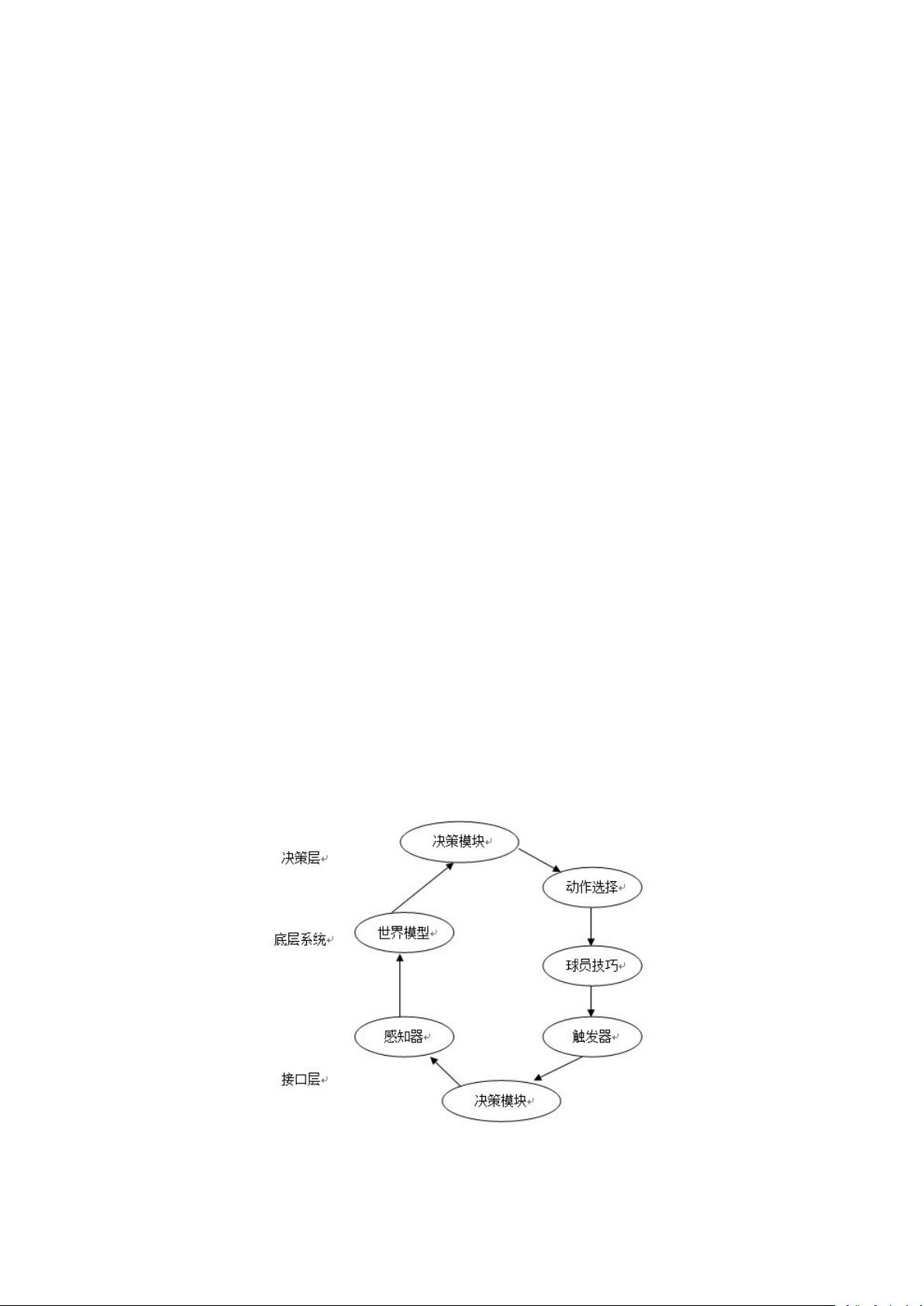
阿福队采用的程序框架是一个三层结构:决策层、底层系统和接口层。决策层负责高级策略,底层系统处理实时感知和动作,而接口层则连接这两者,实现与外界的有效通信。这种设计确保了机器人在动态环境中既能快速响应,也能进行深度思考。
系统底层扮演着关键角色,它整合传感器数据,更新世界模型,同时根据决策层的指令序列化并执行动作。这种设计允许机器人在快速变化的比赛中保持灵活性和适应性。
在实现细节上,阿福队利用面向对象编程和设计模式,确保代码的可维护性和扩展性。程序主要包含以下模块:
1. **通讯模块**:与rcssserver3D进行通信,接收和发送比赛数据。
2. **消息解析模块**:处理服务器消息,将信息转化为机器人可理解的形式。
3. **世界模型构建模块**:构建和更新机器人对环境的理解。
4. **决策生成模块**:基于当前状态制定战术决策。
5. **个体动作模块**:执行如行走、踢球等具体动作。
通过这些模块的协同工作,阿福队的机器人能够实现与真实球员类似的感知、思考和行动,从而在RoboCup3D比赛中展现强大的竞争力。论文还提及了队伍对新环境和规则的适应性,以及在新领域的探索,展示了持续的技术进步和创新能力。
江南大学阿福队 (RoboCup3D) 队伍描述
RoboCup 是一项研究 分布式人工智能、智能机器人技术及其相关领域的研 究
大型比赛和学术活动,他已成为检验各种不同的 AI 技术的一个良好的平台。 要
建立出一支完整的具有竞争力的球队,需要完成许多工作,首先必须完善球
队底层,要有良好的底层框架以方便后续开发,进而建立机器人世界模型,
实现走路踢球等各种动作以及使机器人进行自主的决策。
江南大学阿福 RoboCup3D 仿真足球队 (JNafu3D) 作为 RoboCup 的新成员,
成立于 2008 年 7 月,在 2008 RoboCup 中国机器人大赛中,获得二等奖。 在 过
去的一年时间里, 我们不断完善和改进自己的球队,使球队更加具有竞争力。
今年的比赛环境和比赛规则都有所的改变,经过我们不懈的努力,不仅使球队 在
新的比赛环境中也能够发挥出正常水平, 还在一些新的领域中进行了切实可行 的
探索。
一、程序框架
在 RoboCup 这样一个动态实时的系统中,场上的情况瞬息万变,机器人面 对
的是一个动态的环境, 不仅需要保持对紧急情况的及时处理,还要能进行复杂 的
决策思考。 为了能满足 RoboCup 的比赛要求, 我们运用层结构的方式将整个机 器
人体系分为三层,即决策层,底层系统,和接口层。从而使机器人作为一个球 队
的球员,能够独立完成接受感知信息,进行决策,决定动作 , 并发出命令。球员
系统结构如下图 1 。
图 1 Agent 结构图
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐




新的奇迹
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机组成原理期末试题及答案(2011参考)
- 均值漂移算法深入解析及实践应用
- 掌握npm与yarn在React和pg库中的使用
- C++开发学生信息管理系统实现多功能查询
- 深入解析SIMATIC NET OPC服务器与PLC的S7连接技术
- 离心式水泵原理与Matlab仿真教程
- 实现JS星级评论打分与滑动提示效果
- VB.NET图书馆管理系统源码及程序发布
- C#实现程序A监控与自动启动机制
- 构建简易Android拨号功能的应用开发教程
- HTML技术在在线杂志中的应用
- 网页开发中的实用树形菜单插件应用
- 高压水清洗技术在储罐维修中的关键应用
- 流量计校正方法及操作指南
- WinCE系统下SD卡磁盘性能测试工具及代码解析
- ASP.NET学生管理系统的源码与数据库教程
