STM32 CAN通信波特率配置详解
需积分: 0 169 浏览量
更新于2024-08-05
1
收藏 158KB PDF 举报
"STM32的CAN通信波特率设置是一个关键环节,涉及到多个参数的计算与配置。在STM32微控制器中,CAN (Controller Area Network) 接口支持CAN 2.0A和2.0B协议,具有FIFO功能和中断机制,常用于设备间的高效通信。在进行波特率设定时,需要考虑内部时钟的应用以及APB1总线的工作时钟频率。"
STM32中的CAN通信依赖于bxCAN模块,该模块连接到APB1总线。APB1时钟是从系统时钟经过多次分频得到的,系统时钟可以是HSI(高速内部时钟)、HSE(高速外部时钟)或PLLCLK(锁相环时钟)。具体分频因子在初始化代码中如`system_stm32f10x.c`中的`SetSysClockTo72(void)`函数中设定,这会影响到CAN模块的工作时钟。
为了计算CAN的波特率,我们需要知道几个关键参数:
1. APB1总线时钟频率:这是计算的基础,通常会根据系统时钟和预分频器设置来确定。
2. bxCAN的预分频器(CAN_InitStructure.CAN_Prescaler):它决定了CAN总线时钟与CAN模块工作时钟之间的关系。预分频器值越小,波特率越高。
3. 时间段(Time Quanta, tq):CAN通信中的时间量子包括TS1、TS2和SJW(同步跳跃宽度),它们与总线时钟频率共同决定每个比特的时间长度。
计算公式为:总线时钟频率(MHz) / [(3 + TS1 + TS2) * (BRP + 1)] = 波特率
例如,假设APB1时钟为72MHz,预分频器设为4,那么CAN模块的工作时钟为72MHz / 2 / 4 = 9MHz。如果设置CAN_InitStructure.CAN_BS1为3个时间量子(CAN_BS1_3tq,对应值为0x02),CAN_InitStructure.CAN_BS2为5个时间量子(CAN_BS2_5tq),加上1个SJW时间量子,总时间为9tq。因此,每个比特时间是1/36MHz,所以波特率是1MHz。
在实际应用中,配置CAN接口的步骤通常包括:
1. 初始化CAN模块结构体,如`CAN_InitStructure`。
2. 配置CAN工作模式、位定时参数等,如`CAN_InitStructure.CAN_SJW`、`CAN_InitStructure.CAN_BS1`和`CAN_InitStructure.CAN_BS2`。
3. 初始化过滤器设置,如`CAN_FilterInitStruct`,以便接收和发送特定ID的数据帧。
4. 使用`CAN_Init()`函数启动CAN初始化。
5. 可能还需要配置中断,以便在数据收发时触发相应的处理程序。
总结来说,STM32的CAN通信波特率设置涉及到多个层次的计算和配置,包括系统时钟、APB1总线时钟、预分频器以及位定时参数。正确理解并设置这些参数对于实现可靠且准确的CAN通信至关重要。
STM32
的
CAN
波特率计算
STM32 里的 CAN 支持 2.0A,2.0B, 带有 FIFO,中断等, 这里主要提一下内部的时钟应用.
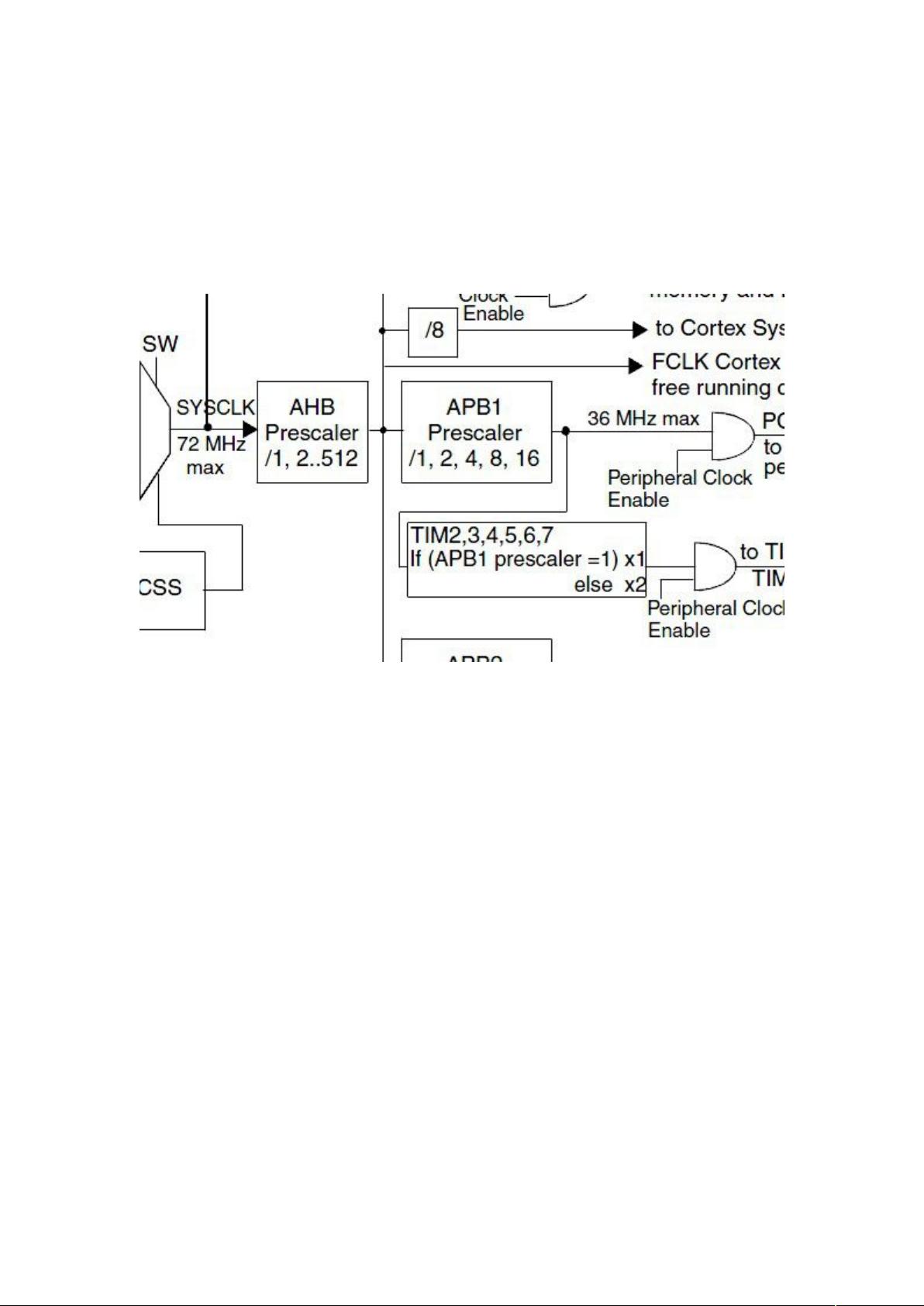
bxCAN 挂接在 APB1 总线上,采用总线时钟,所以我们需要知道 APB1 的总线时钟是多少. 我们
先看看下图,看看 APB1 总线时钟:
APB1 时钟取自 AHB 的分频, 而 AHB 又取自系统时钟的分频, 系统时钟可选 HSI,HSE, PLLCLK,
这个在例程的 RC 设置里都有的,
然后再看看有了 APB1 的时钟后,如何算 CAN 的总线速率, 先看下图:
下载后可阅读完整内容,剩余5页未读,立即下载
1869 浏览量
点击了解资源详情
167 浏览量
186 浏览量
1779 浏览量
128 浏览量

高工-老罗
- 粉丝: 27
 我的内容管理
展开
我的内容管理
展开







最新资源
- PB操作权限动态控制实现
- 经典Shell编程指南:Linux与UNIX详解
- C#经典教程:从入门到高级
- Ruby入门与Rails实践:理解关键语言和选择框架挑战
- 探索Prototype.js 1.4版:非官方开发者指南与Ruby类库灵感
- 软件需求分析关键要素详解
- Effective STL:深入理解并高效使用STL
- 使用Ajax实现三级联动下拉菜单详细教程
- Linux内核0.11完全注释 - 深入理解操作系统工作机理
- C++实现词法分析器
- ASP.NET 2.0+SQL Server实战:酒店与连锁配送系统开发
- 植物生长模型:L-系统在植物发育可视化中的应用
- Oracle BerkeleyDB内存数据库入门
- 遗传算法驱动的工程项目网络计划优化与多任务调度研究
- 敏捷开发实战:从JAVA到Essential Skills
- JSP与Oracle数据库编程实战指南
