WLKATA Mirobot G代码指令集详解
需积分: 0 178 浏览量
更新于2024-08-05
收藏 563KB PDF 举报
"WLKATA MIROBOT 代码指令集说明书1主要介绍了MIROBOT机器人的通信方式、基于G代码的指令控制以及对外输出的PWM信号功能。文档由北京勤牛创智科技有限公司编写,详细阐述了MIROBOT的指令格式、功能说明以及返回值解释。"
MIROBOT是一款采用USB串口通信的机器人,其通信协议基于G代码,对字母大小写不敏感。这款机器人具备输出两组PWM信号的能力,可用于控制末端执行器,如夹手或吸盘。文档中提到了两个关键指令:
1. 查询当前机械臂状态与位置信息的指令:
该指令没有参数,执行后返回机械臂的状态,包括各轴的角度值(A、B、C、D、X、Y、Z轴),末端位置的X、Y、Z坐标,姿态RPY角(Rx、Ry、Rz)以及两组PWM输出值。返回值示例表明,当机械臂处于空闲状态且所有轴角度为0时,末端位置和姿态也为初始状态,两路PWM值为0。
2. M50指令:
这个指令用于解除机器人上电后的轴锁定状态,允许机械臂进行运动。
文档还提到了版本历史,其中1.1版增加了更多指令的说明。然而,具体指令集的详细内容在提供的摘要中并未完全展开,包括G代码的详细指令集和其他可能的功能,如移动、旋转等操作。
对于使用Python编程的用户来说,理解这些指令集和通信协议是控制MIROBOT的关键。可以创建Python脚本来发送G代码指令,通过USB串口与MIROBOT交互,实现对机械臂的精确控制。例如,编写Python程序来读取机械臂当前状态,根据需要发送M50指令解锁轴,然后发送其他G代码指令来规划和执行特定的运动路径。
在实际应用中,开发者需要结合MIROBOT的硬件特性,如关节的旋转范围、负载能力以及PWM输出的电压范围,来编写合适的控制逻辑。此外,理解机器人的坐标系统和原点位置也是确保程序正确性的必要条件。通过熟练掌握这些指令,用户能够开发出自动化的工作流程,用于各种场景,如组装、搬运、检测等。
北京勤牛创智科技有限公司
第 1 页 共 10 页
WLKATA MIROBOT G0 代码指令集说明书
版本历史
版本号
更新时间
变更记录
编写人
1.0
2019-11-22
周东旭
1.1
2020-2-11
增加一些指令说明
周东旭
一、 指令说明
1. Mirobot 采用 USB 串口方式进行通信。波特率为 115200,数据位 8,停止位 1。
1.Mirobot 采用基于 G 代码的指令控制。
2.指令中各个字母不区分大小写。
3.Mirobot 能够对外输出两组 PWM 信号用于控制末端夹手或者吸盘。
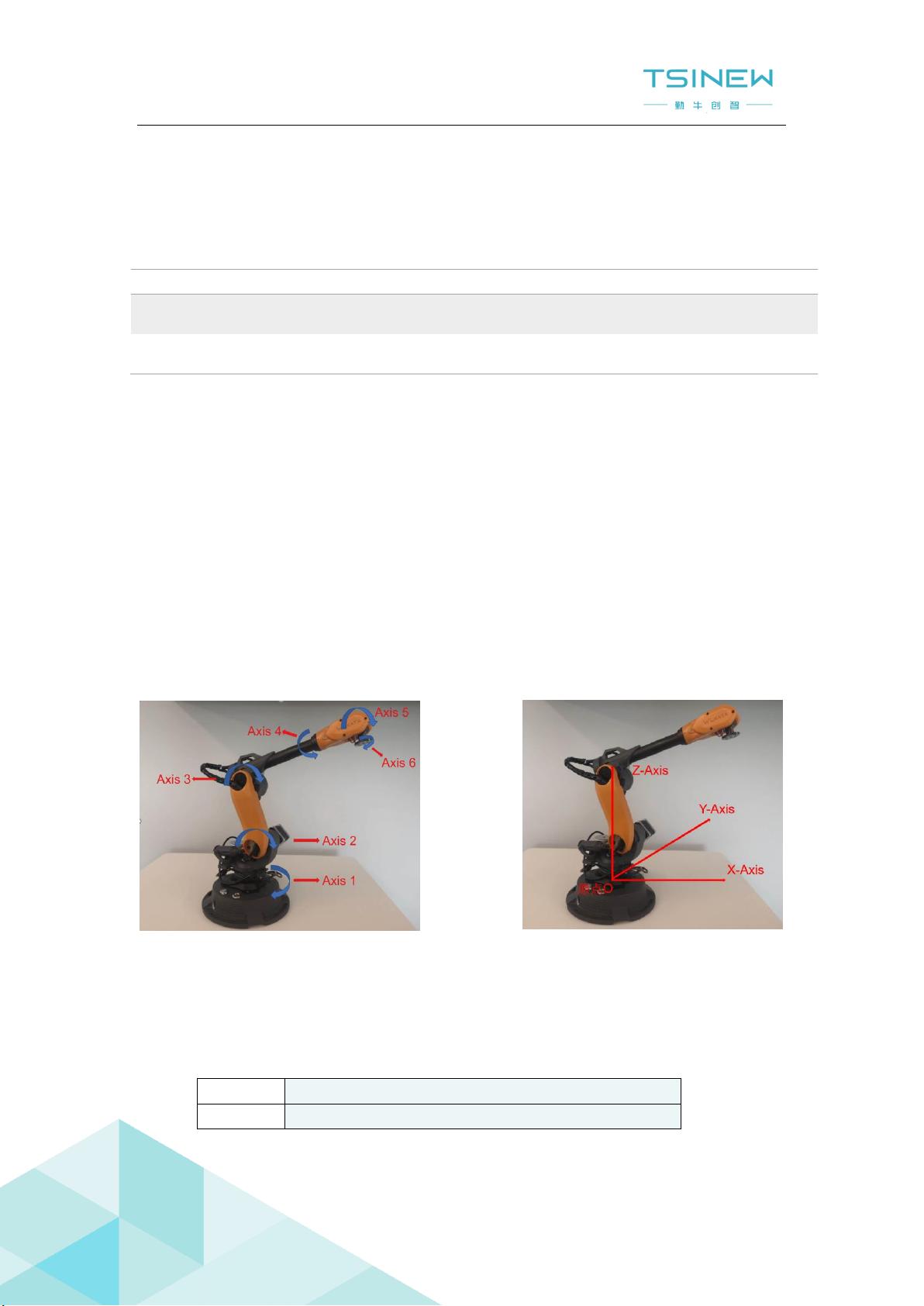
Fig. 1 The six axes of Mirobot Fig. 2 Robot coordinate system and origin
二、 指令集
1.
指令格式
?
功能说明
获取当前机械臂状态与位置信息
下载后可阅读完整内容,剩余9页未读,立即下载
2022-08-04 上传
2022-08-04 上传
点击了解资源详情
2023-05-27 上传
2023-05-17 上传
2023-03-29 上传
2023-03-29 上传
2023-05-22 上传
2023-09-21 上传

Period熹微
- 粉丝: 28
- 资源: 307
 我的内容管理
展开
我的内容管理
展开







最新资源
- 十种常见电感线圈电感量计算公式详解
- 军用车辆:CAN总线的集成与优势
- CAN总线在汽车智能换档系统中的作用与实现
- CAN总线数据超载问题及解决策略
- 汽车车身系统CAN总线设计与应用
- SAP企业需求深度剖析:财务会计与供应链的关键流程与改进策略
- CAN总线在发动机电控系统中的通信设计实践
- Spring与iBATIS整合:快速开发与比较分析
- CAN总线驱动的整车管理系统硬件设计详解
- CAN总线通讯智能节点设计与实现
- DSP实现电动汽车CAN总线通讯技术
- CAN协议网关设计:自动位速率检测与互连
- Xcode免证书调试iPad程序开发指南
- 分布式数据库查询优化算法探讨
- Win7安装VC++6.0完全指南:解决兼容性与Office冲突
- MFC实现学生信息管理系统:登录与数据库操作
