Arduino Servo 控制教程:转动角度与原理解析
126 浏览量
更新于2024-08-29
收藏 279KB PDF 举报
"Ardino基础教程19_舵机控制"
在Arduino编程中,舵机控制是一项基本技能,尤其对于构建机器人或自动化项目。舵机是一种特殊类型的电机,能够精确地在特定角度范围内(通常是0到180度)来回移动,并保持该位置。它们在模型飞机、机器人和其他需要精确角度控制的设备中非常常见。
舵机的工作原理基于PWM(脉冲宽度调制)信号,这种信号用于指示舵机转动到哪个角度。一个标准的PWM周期为20毫秒,而脉冲宽度可以在1毫秒到2毫秒之间变化,对应舵机的0度到180度转动。不过,不同品牌的舵机可能对脉冲宽度有不同的响应,因此实际操作时需要根据具体型号调整。
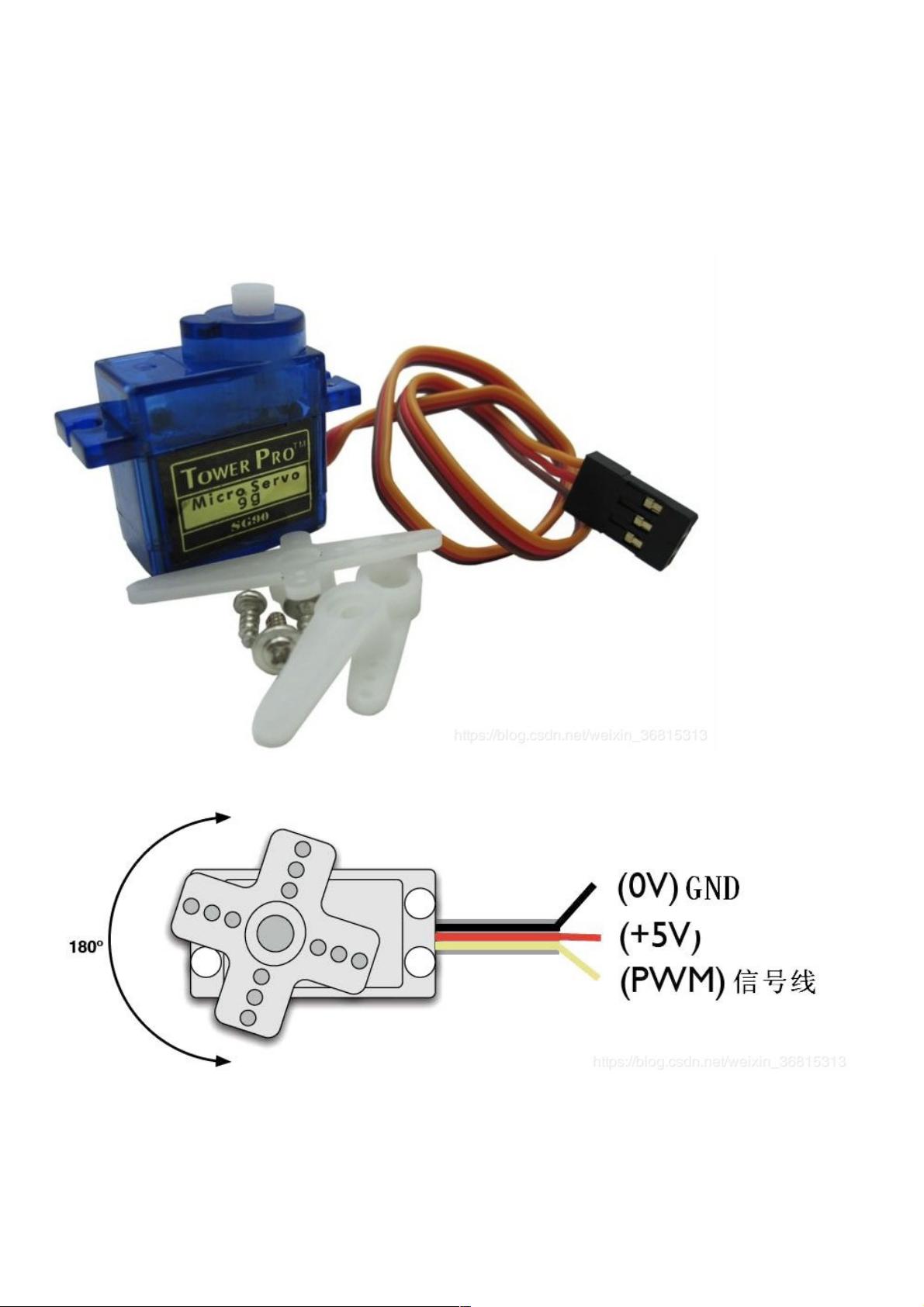
舵机通常有三条线:棕色为接地线(GND)、红色为电源正极线(+VCC,通常连接到5V或3.3V电源)、橙色(或黄色)为信号线,它接收来自Arduino的PWM信号以控制电机转动。在接线时,确保正确连接这些线,以免损坏舵机或Arduino板。
Arduino控制舵机主要有两种方式:
1. **模拟PWM控制**:通过Arduino的数字输出引脚,如D3、D5等,自定义PWM信号来驱动舵机。这需要编写更复杂的代码来生成合适的脉冲宽度。这种方法灵活性较高,但需要对PWM有深入理解。
2. **使用Servo库**:Arduino的Servo库提供了一种更简单的方式来控制舵机,它自动处理PWM信号生成,允许用户通过设置角度值(0-180)来控制舵机。然而,Servo库默认仅支持数字9和10两个引脚,且Arduino板本身的驱动能力有限,如果需要控制多个舵机,可能需要外部电源。
实验中,你可以使用以下步骤来控制舵机:
1. 将舵机的电源线连接到Arduino的5V,接地线连接到GND,信号线连接到数字9引脚。
2. 在Arduino IDE中编写程序,使用`Servo`库实例化一个舵机对象,然后使用`write()`函数设置舵机的角度。
3. 编程时,可以让用户输入一个角度值,程序会将这个值转换为适当的脉冲宽度并发送给舵机,使舵机转动到相应角度。
4. 编译并上传程序,观察舵机的运动。
在实践中,记得检查你的代码是否正确引用了Servo库,并确保在程序中初始化、配置和使用舵机对象。例如:
```cpp
#include <Servo.h>
Servo myservo; // 创建一个Servo对象
int pos = 0; // 初始化舵机位置
void setup() {
myservo.attach(9); // 连接到数字9引脚
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // 从0度到180度
myservo.write(pos); // 设置角度
delay(15); // 延时以平滑转动
}
for (pos = 180; pos >= 0; pos -= 1) { // 从180度回到0度
myservo.write(pos);
delay(15);
}
}
```
这个简单的循环将使舵机在0度和180度之间来回转动。通过调整延迟时间,可以改变转动速度。在更复杂的项目中,你可能会结合传感器或其他输入设备,以实时控制舵机的角度。
理解和掌握舵机的工作原理以及如何使用Arduino控制它们是电子制作和机器人学的基础,也是进一步探索自动化和互动装置的关键步骤。通过实践和实验,你可以更好地了解如何利用这些小但功能强大的部件。
Ardino基础教程基础教程 19_舵机控制舵机控制
实验十九:舵机控制实验十九:舵机控制
舵机控制实验Servo库版本的代码参考如下链接:ArduinoCode19-舵机控制Servo库版本代码.ino
舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机或者
单片机发出信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms 的基准信号,将获得的直流偏置电压与电
位器的电压比较,获得电压差输出。经由电路板上的IC 判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传
至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。适用于那些需要角度不断变化并可以保持的控制系统。当电机
转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。一般舵机旋转的角度范围是0 度到180
度。
舵机有很多规格,但所有的舵机都有外接三根线,分别用棕、红、橙三种颜色进行区分,由于舵机品牌不同,颜色也会有所差
异,棕色为接地线,红色为电源正极线,橙色为信号线。
舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的,标准PWM(脉冲宽度调制)信号的周期固定为
20ms(50Hz),理论上脉宽分布应在1ms到2ms 之间,但是,事实上脉宽可由0.5ms 到2.5ms 之间,脉宽和舵机的转角0°~
180°相对应。有一点值得注意的地方,由于舵机牌子不同,对于同一信号,不同牌子的舵机旋转的角度也会有所不同。
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2020-02-18 上传
2020-02-18 上传
2021-12-25 上传
2024-05-05 上传
2013-06-26 上传

weixin_38738422
- 粉丝: 3
- 资源: 922
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
