机械系统数字控制入门:应用导向教程
需积分: 10 37 浏览量
更新于2024-07-17
收藏 1.08MB PDF 举报
"《应用数字控制入门》第二版是机械工程领域为高级或初级研究生提供的一本关于机械系统数字控制的教材,特别强调实际应用。作者格雷戈里·S·斯特拉在编写本书时,对现有的数字控制教科书感到不满,尽管它们内容详尽,但更适合于查阅而非教学指导。斯特拉认为,尽管近年来已有更多以学生为导向的新教材出现,但市场仍缺乏一本针对初学者的、更侧重实践应用的教材。
书中深入浅出地讲解了数字控制系统的设计与分析,特别是如何利用MATLAB这样的工具进行实时系统建模、仿真和优化。作者强调了MATLAB在实际工程中的重要性,并提供了大量的MATLAB脚本和实例,帮助读者掌握这一关键技能。斯特拉感谢了他的家人,包括妻子安妮和四个儿子保罗、基思、马克和杰夫,他们在本书准备和修订过程中给予了极大的支持,同时他也怀念已故的父亲杜克·斯特拉,他鼓励那些热爱数学和摩托车的儿子。
通过这本书,读者可以学习到如何将数字控制理论应用于机械系统的实际问题解决,包括传感器数据处理、控制器设计、系统辨识以及闭环控制系统的调试和优化。书中不仅涵盖了基本概念,还涉及现代技术趋势,如网络化控制和嵌入式系统,使得学生在进入职场后能迅速适应快速发展的数字化控制领域。《应用数字控制入门》旨在为机械工程专业学生提供一个实用且全面的学习平台,弥补了传统教材在教学实用性上的不足。"
2 CHAPTER 1. INTRODUCTION AND SCOPE OF THIS BOOK
Computer
+
-
A/D
Clock
D/A Plant
Sensor
r(t) e(t) e(kT)
u(kT) u(t)
w(t)
y(t)
v(t)
ˆ
y(t)
r = reference input or setpoint
u = control force (actuator input)
y = controlled variable or output
ˆy = measurement of controlled variable
e = r − ˆy = error signal
w = disturbance acting on the plant
v = measurement noise
A/D = analog-to-digital converter
D/A = digital-to-analog converter
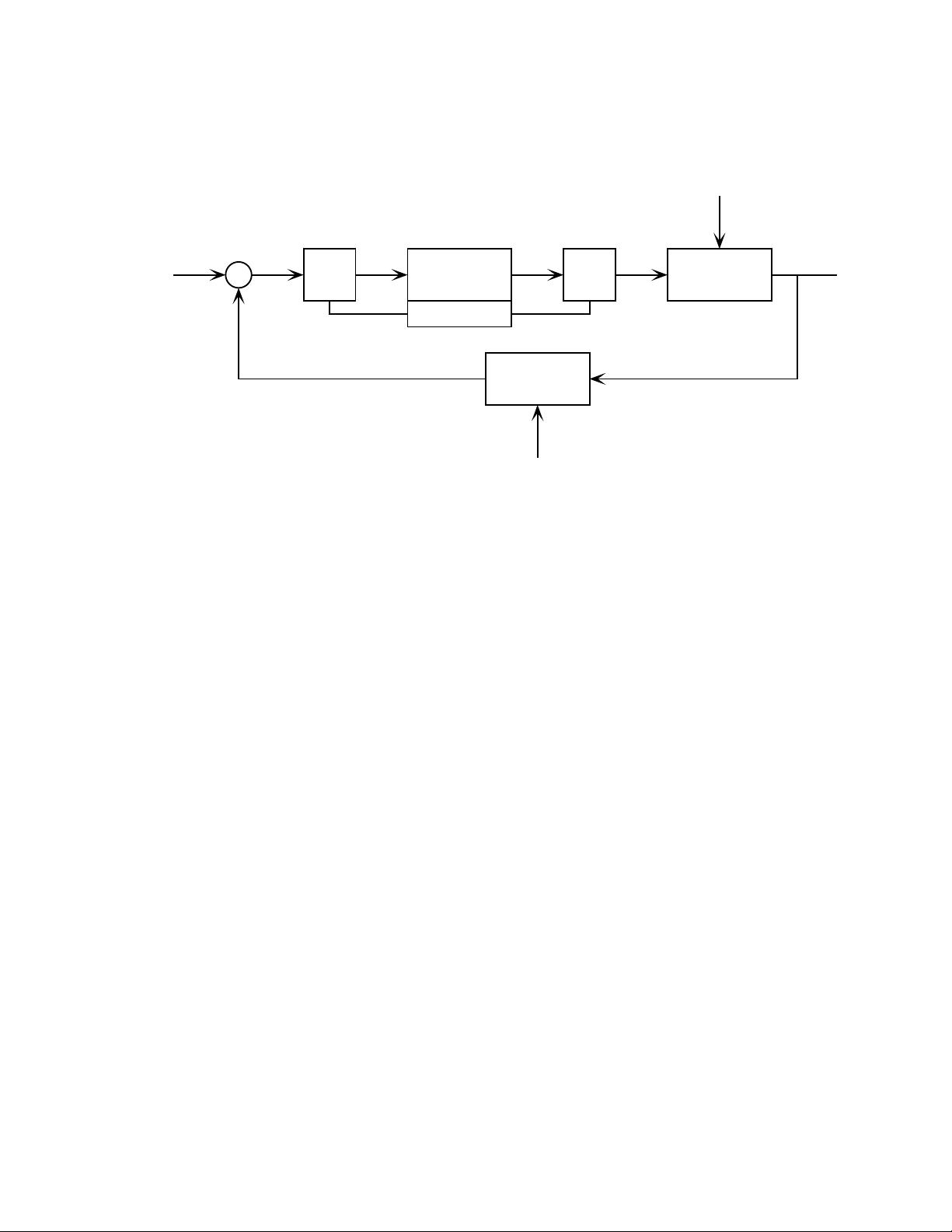
Figure 1.1: Basic digital control system.
1.1.2 Digital control
Digital control systems employ a computer as a fundamental component in the controller. The
computer typically receives a measurement of the controlled variable, also often receives the reference
input, and produces its output using an algorithm. This output is usually converted to an analog
signal using a D/A converter, then amplified by a power amplifier to drive the plant. A block
diagram of a typical digital control system is shown in Figure 1.1.
When compared to a continuous-time system, there are three new elements in the block diagram of
Figure 1.1:
• A/D converter. This device acts on a continuous physical variable, typically a voltage, and
converts it into an integer number. A/D converters typically have unipolar ranges of 0–5 V,
0–10 V, or bipolar ranges of ± 5 V, or ± 10 V. These are often jumper-selectable. The A/D
conversion causes quantization q, given by the resolution of the converter in bits. Common
resolutions are 8 bits (256 levels), and 12 bits (4096 levels). A 12-bit A/D converter of range
±10 volts would have a conversion quantum of q = 20/4096 = 4.88 mV. Note that quantization



剩余196页未读,继续阅读
2015-09-22 上传
202 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

qq_35751287
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
