多车辆协作控制中的分布式共识理论与应用概述
需积分: 9 5 浏览量
更新于2024-07-15
收藏 2.61MB PDF 举报
《分布式一致性在多车辆协同控制中的理论与应用》是由任伟等人于2007年1月发表的一篇研究论文,主要探讨了在多智能体系统中实现分布式共识协议的关键理论和实际应用。文章的主题关注于多车辆的协同控制,这是一个多智能体协作的典型场景,其中每个车辆都作为独立的智能体,需要通过协调达成共识,以便于整体上执行共同的目标或策略。
在多智能体系统中,分布式一致性是关键的通信和决策机制,它确保了所有智能体在没有中心控制的情况下,能够就共享状态或目标达成一致。文中可能讨论了诸如领导选举算法、消息传递模型、同步问题解决、以及容错性和效率优化等相关技术。通过使用像Aerial Recovery View这样的项目,研究者们展示了如何将理论应用于实际飞行器控制系统的恢复策略,确保在复杂环境中保持协调。
作者Randal W. Beard来自 Brigham Young University-Provo Main Campus,他的研究领域与多车辆协同控制紧密相关,有着丰富的出版物和引用记录。他和Wei Ren(犹他州立大学电气与计算机工程系副教授)等作者共同组织了Workshop 5: Cooperative Control of Multiple Autonomous Vehicles,这是IFAC世界大会的一部分,于2008年7月6日举行,旨在推动该领域的前沿研究和交流。
该论文的研究得到了国家自然科学基金(NSFC)Career Award (ECCS-0748287)的支持,以及Utah Water Research Laboratory的资助,这表明其工作不仅具有理论深度,也具备实际应用价值。文章的核心内容包括理论分析、算法设计、仿真验证以及对实际应用场景的案例研究,为理解多智能体分布式控制提供了深入的洞察。
阅读这篇文章可以帮助读者深入了解分布式一致性协议在多车辆协同控制中的核心作用,对于希望在自动化、机器人、无人驾驶汽车等领域进行研究的工程师和技术人员来说,具有重要的参考价值。
10
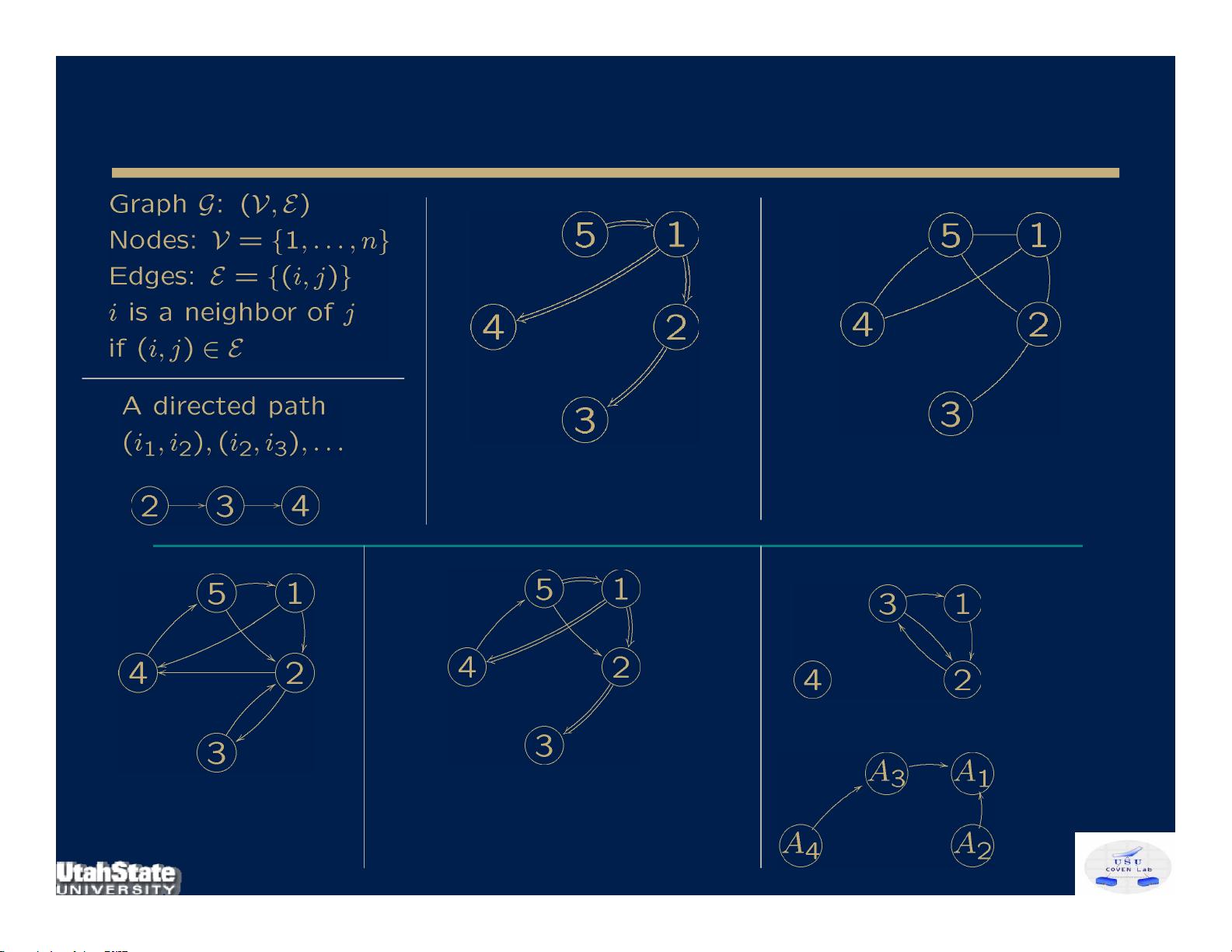
Modeling of Vehicle Interactions
A graph that has a spanning
tree but not strongly connected
A directed graph that
is strongly connected
A undirected graph
that is connected
A directed spanning tree
(i) Separated groups
(ii) Multiple leaders

剩余60页未读,继续阅读
302 浏览量
437 浏览量
274 浏览量
312 浏览量
189 浏览量
245 浏览量
357 浏览量
210 浏览量
282 浏览量
1051 浏览量

Ed_Lay
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- DeepFreeze密码移除工具6.x版本使用教程
- MQ2烟雾传感器无线报警器项目解析
- Android实现消息推送技术:WebSocket的运用解析
- 利用jQuery插件自定义制作酷似Flash的广告横幅通栏
- 自定义滚动时间选择器,轻松转换为Jar包
- Python环境下pyuvs-rt模块的使用与应用
- DLL文件导出函数查看器 - 查看DLL函数名称
- Laravel框架深度解析:开发者的创造力与学习资源
- 实现滚动屏幕背景固定,提升网页高端视觉效果
- 遗传算法解决0-1背包问题
- 必备nagios插件压缩包:实现监控的关键
- Asp.Net2.0 Data Tutorial全集深度解析
- Flutter文本分割插件flutter_break_iterator入门与实践
- GD Spi Flash存储器的详细技术手册
- 深入解析MyBatis PageHelper分页插件的使用与原理
- DELPHI实现斗地主游戏设计及半成品源码分析
