ROS开发工具的产品化探索:rviz、命令行工具和rqt工具
7 浏览量
更新于2024-08-28
收藏 501KB PDF 举报
ROS开发工具篇
ROS(Robot Operating System,机器人操作系统)是当前机器人领域中最流行的操作系统之一,其提供了丰富的开发工具,帮助开发者快速搭建机器人应用。今天,我们将探索ROS的开发工具篇,了解ROS中的原生工具,包括rviz、命令行工具和rqt工具等。
一、ROS原生工具
ROS的原生工具非常丰富,包括可视化的qt工具和命令行工具等。这些工具和ROS系统的依赖性最强,想要实现产品化并不容易。ROS的原生工具可以分为三大类:rviz、命令行工具和rqt工具。
1.1 rviz
rviz是ROS中的一个三维可视化平台。它可以把不直观的数据统统可视化地显示出来,比如图像、地图、模型、路径等等。rviz最厉害的地方是它的扩展性,可以通过插件的形式无限扩展,打造自己的人机交互界面。
rviz的优点:
* 可以把不直观的数据统统可视化地显示出来
* 扩展性强,可以通过插件的形式无限扩展
* 可以打造自己的人机交互界面
rviz的缺点:
* 对ROS核心通信机制的强依赖
* 系统中必须要运行ROSMaster,显示的数据需要通过话题发布
* 运行不稳定等等
1.2 命令行工具
ROS提供的命令行工具非常丰富,比如rostopic、rosservice、rosnode、rosparam等等。这些工具虽然没有图形化工具那么直观,但是很多时候更加简洁明快。
命令行工具的优点:
* 簡洁明快
* 可以快速执行命令
命令行工具的缺点:
* 没有图形化工具那么直观
* 需要熟悉命令行操作
1.3 rqt工具
ROS还提供了一系列轻量化的可视化工具,比如:
* 显示计算图的rqt_graph
* 显示数据包的rqt_bag
* 绘制数据曲线的rqt_plot
这些工具的问题和rviz类似,或者说ROS的原生工具都有这样的问题,毕竟是“直系血亲”,和ROS核心部分紧密相连,同样继承了ROS通信机制部分的问题。
rqt工具的优点:
* 轻量化的可视化工具
* 可以快速显示计算图、数据包和数据曲线
rqt工具的缺点:
* 和ROS核心部分紧密相连,同样继承了ROS通信机制部分的问题
二、ROS开发工具在机器人产品化中的应用
ROS的原生工具可以在机器人产品化中发挥重要作用,例如:
* rviz可以用于机器人的三维可视化
* 命令行工具可以用于机器人的命令行控制
* rqt工具可以用于机器人的轻量化可视化
ROS的原生工具可以帮助开发者快速搭建机器人应用,并且可以在机器人产品化中发挥重要作用。但是,需要注意这些工具的问题,例如对ROS核心通信机制的强依赖、系统中必须要运行ROSMaster等等。
浅谈浅谈ROS的产品化探索(二)的产品化探索(二)——开发工具篇开发工具篇
一、ROS原生工具
ROS的原生工具非常丰富,可以参考wiki上的说明:
http://wiki.ros.org/Tools
无论是可视化的qt工具还是命令行工具,都频繁用于ROS开发,这些工具和ROS系统的依赖性最强,想要实现产品化并不容
易。
rviz
首先来看最重要的一个工具——rviz。
rviz是ROS中的一个三维可视化平台。为什么说它是ROS最重要的一个工具呢?因为rviz可以把不直观的数据统统可视化地显
示出来,比如图像、地图、模型、路径等等,这些还只是rviz官方提供的显示插件。
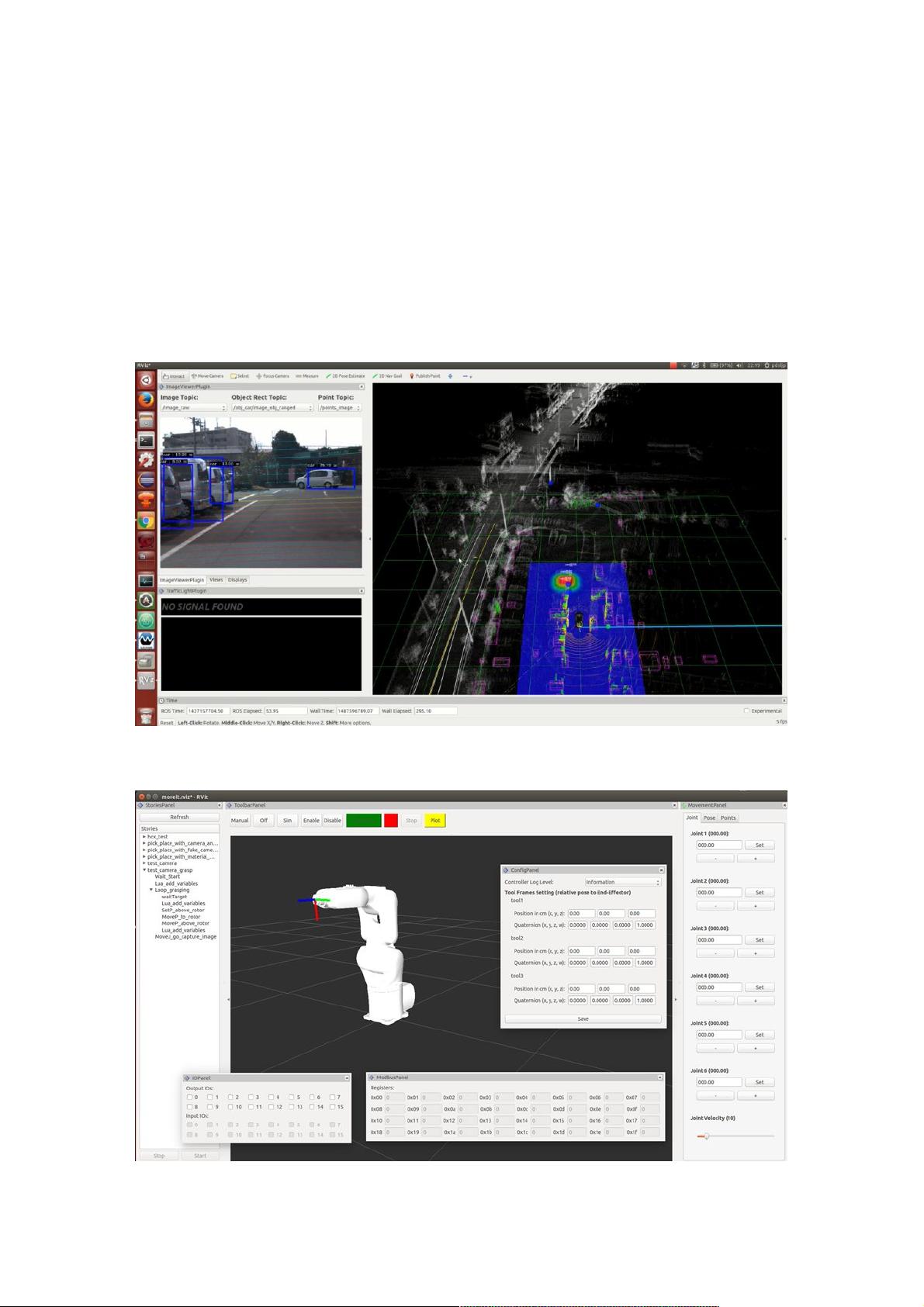
rviz最厉害的地方是它的扩展性,可以通过插件的形式无限扩展,打造自己的人机交互界面。比如上图是ROScon2017开场演
讲的Autoware项目,他们将rviz用于无人驾驶汽车的上位机平台。
上图是我们自己项目开发中设计的rviz插件,作为机器人控制的上位机。
rviz原生的显示组件配合定制化开发的插件,功能强大,开发迅速,简直不能再好用了!
OK!吹了半天rviz的强大,也得说说它的问题!
下载后可阅读完整内容,剩余4页未读,立即下载
164 浏览量
230 浏览量
108 浏览量
158 浏览量
189 浏览量
158 浏览量
189 浏览量
197 浏览量
2025-02-17 上传

weixin_38692100
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- JSP高级编程:结合J2EE, XML, JDBC与网络程序设计
- C++/C编程最佳实践指南
- Hibernate开发入门与高级特性解析
- Struts1架构详解:入门与核心标签库指南
- 南开大学计算机等级考试C++上机100题解析
- 计算机网络概览:教学内容与核心技术
- Java Persistence API (JPA) 教程 - 深入理解ORM规范
- MATLAB在语音信号处理教学中的应用实践
- 嵌入式非特定人孤立词语音识别系统设计
- Groovy编程:Java开发者入门必备
- 软件国际化与本地化测试:打造全球适用的基石
- Oracle初学者常见问题与解答
- Cygwin中GDB调试指南
- C++/C程序员基础编程技能面试试题
- Python与Qt快速构建GUI应用
- 简易网页动态时钟实现代码
