ROS产品化应用:底层驱动与上层功能解析
138 浏览量
更新于2024-08-27
收藏 524KB PDF 举报
本文深入探讨了ROS(Robot Operating System)在产品化探索中的应用功能篇,主要分为底层驱动和上层功能两部分。
首先,底层驱动是机器人开发的核心,ROS为开发者提供了丰富的硬件支持。传感器驱动是基础,如常见的USB摄像头,ROS中有如usb_cam和uvc_camera这样的驱动包,它们能够稳定地支持1080P摄像头的图像识别,但并非无懈可击,偶尔会出现不可预测的问题。以Dynamixel伺服为例,dynamixel_motor功能包使得与之集成变得简单,然而长时间运行后可能出现稳定性问题,如在KungfuArm项目中,虽然没有明显错误提示,但在某些情况下可能会出现控制异常。
ROS还支持像EtherCAT这样的实时工业以太网总线,其开源库在ROS中被整合为ethercat_soem功能包,早期项目曾使用过,但在实际应用中,稳定性、实时性和功能性方面仍有待提升。底层驱动的稳定性受原始驱动质量和ROS通信机制的影响。
上层功能是ROS的强项,它涵盖了广泛的机器人应用,包括SLAM(同时定位和建图)、导航、定位、图像处理和机械臂控制等。ROS的导航框架简化了开发过程,但实际应用时,由于环境复杂性与理论模型之间的差距,功能效果往往不能满足需求,需要不断调整参数以优化。例如,尽管ROS的导航功能快速实现,但为了达到产品化标准,开发者可能需要花费大量时间在参数调优和功能定制上。
总结来说,ROS作为机器人操作系统,其底层驱动提供了基础硬件支持,而上层功能则为各种高级应用提供了丰富的工具。然而,在产品化过程中,除了技术层面的集成,还需要充分考虑实际应用场景的复杂性,以及持续优化和调试以确保系统的稳定性和性能。
浅谈浅谈ROS的产品化探索(三)的产品化探索(三)——应用功能篇应用功能篇
一、底层驱动
机器人开发是一个软硬件结合的领域,常常需要涉及很多传感器、执行器的驱动。常用的硬件一般都可以在ROS中找到匹配
的驱动功能包,例如传感器可以参考wiki上的这个列表:
http://wiki.ros.org/Sensors
针对常用的USB摄像头,ROS中有usb_cam、uvc_camera等功能类似的驱动包,运行还算比较稳定。我们用usb_cam驱动
1080P的摄像头做识别,有的时候连续运行好几天都不会出问题,不过偶尔也会莫名其妙的挂掉。
一些伺服的驱动在ROS当中也可以找到,比如dynamixel的伺服,Kungfu Arm前端的灵巧手使用的就是dynamixel,相关的功
能包是dynamixel_motor。用ROS驱动起来确实简单易用,但是运行时间长了,还是会有问题。有一次给Kungfu Arm录像,
手就有点紧张了,手指不听使唤,把开水洒了一桌子,驱动也没有任何报错信息,重启之后再也没有重现类似的现象。
ROS支持的很多机器人(PR2、KUKA、shadow hand等)都使用到了一种实时工业以太网总线——EtherCAT。EtherCAT本
身就有开源的协议实现方式,ROS将开源库集成为功能包——ethercat_soem,可以在很多机器人的软件源中看到。我们在项
目的初期也使用过这种方式,驱动是没有问题,但是稳定性、实时性、功能方面,都还存在一些问题。
就个人感受而言,ROS中底层驱动相关的功能包,大部分都是对已有开源驱动的集成封装,添加统一的ROS接口,所以稳定
性主要和原本的驱动相关,同时还要考虑ROS通信机制的影响。
二、上层功能
上层功能是ROS最为擅长的一个领域,可以提供众多机器人的应用功能:SLAM、导航、定位、图像处理、机械臂控制等等,
这个部分详细展开够说三天三夜了。我就针对两个部分谈一下自己的看法。
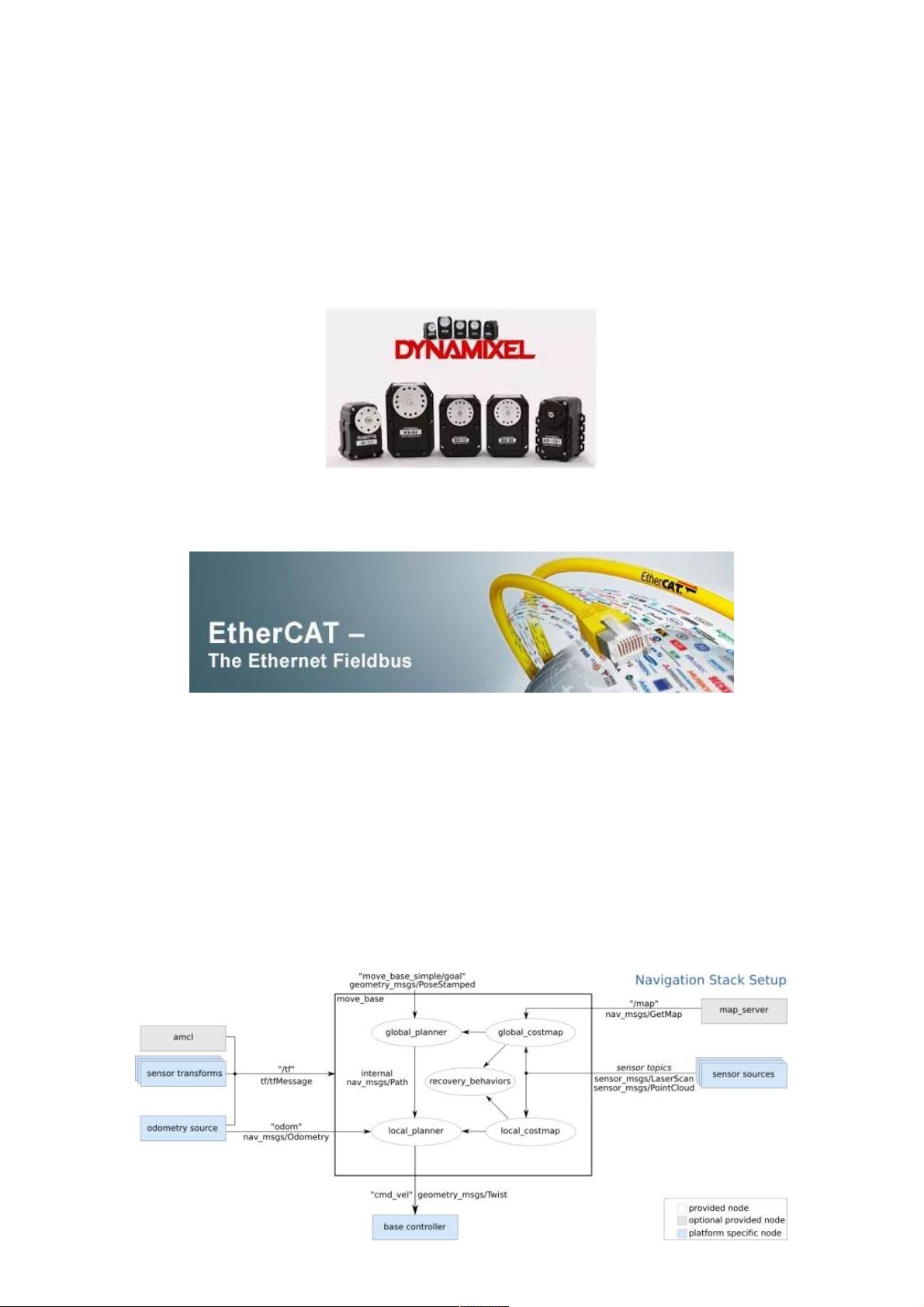
1. 机器人导航
现在很多学校或者公司做机器人导航的时候,都会基于ROS开发。
下载后可阅读完整内容,剩余4页未读,立即下载
223 浏览量
157 浏览量
点击了解资源详情
157 浏览量
178 浏览量
226 浏览量
178 浏览量
192 浏览量

weixin_38612648
- 粉丝: 12
- 资源: 920
 我的内容管理
展开
我的内容管理
展开







最新资源
- Spring Live (160页)
- iBatis Developer's Guide中文版
- Spring iBatis Learning Notes
- Verilog Hardware Description Language
- 《linux完全命令手册》(Linux Complete Command Reference)
- 数控机床RS232通讯接口及参数介绍
- 多型与虚拟.pdf 中文版
- WindowsCE内核简介
- 经典C源程序100例
- 初学者c51学习教程
- GoF 23种设计模式解析附C++实现源码.pdf
- c++编程手册,题目
- Windows 2000 安全配置
- 中南大学微机原理课件
- UML参考手册 UML Reference
- jsp跳转的五种方式
