
基于嵌入式系统的自适应前照灯系统解析基于嵌入式系统的自适应前照灯系统解析
导读:本文介绍了一种基于嵌入式系统的汽车自适应前照灯系统的设计方案,该设计方案满足要求,已经在项
目中获得了良好的应用效果。 此系统中的前照灯控制器采用FPGA来控制CAN总线控制器、数/模转换器和
全桥电机驱动器等器件来实现接收方向盘转角信号,并使电机运行带动前照灯的转向。自适应前照灯系统控制
中心使用的是ARM9处理器。 引言 本设计采用了嵌入式技术来实现,嵌入式技术不仅广泛地应用于汽
车行业,而且在工业自动化、监控系统、医疗仪器等领域也有广泛应用。 1 系统原理设计 本文介绍的
汽车前照灯转向控制器主要是由FPGA、D/A转换器、CAN总线控制器和电机驱动芯片等器件组
导读:本文介绍了一种基于嵌入式系统的汽车自适应前照灯系统的设计方案,该设计方案满足要求,已经在项目中获得了良好导读:本文介绍了一种基于嵌入式系统的汽车自适应前照灯系统的设计方案,该设计方案满足要求,已经在项目中获得了良好
的应用效果。的应用效果。
此系统中的前照灯控制器采用FPGA来控制CAN总线控制器、数/模转换器和全桥电机驱动器等器件来实现接收方向盘转
角信号,并使电机运行带动前照灯的转向。自适应前照灯系统控制中心使用的是ARM9处理器。
引言 引言
本设计采用了嵌入式技术来实现,嵌入式技术不仅广泛地应用于汽车行业,而且在工业自动化、监控系统、医疗仪器等领
域也有广泛应用。
1 系统原理设计系统原理设计
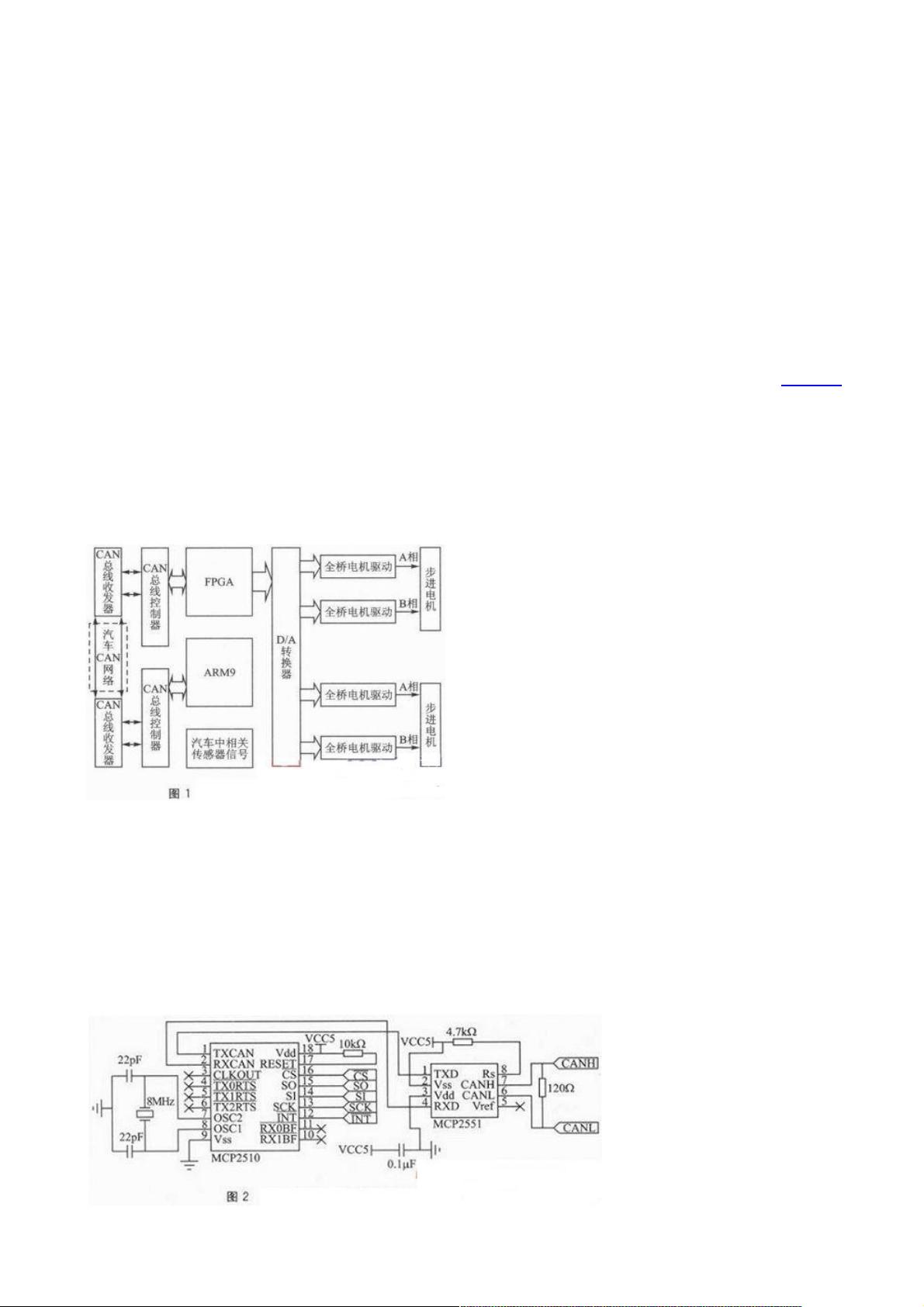
本文介绍的汽车前照灯转向控制器主要是由FPGA、D/A转换器、CAN总线控制器和电机驱动芯片等器件组成的。它的设
计分为CAN总线控制器模块和电机驱动模块两部分,由FPGA来控制并连接这两个模块。CAN总线控制器模块实现接收CAN
报文包消息,FPGA通过处理CAN报文包消息来控制电机驱动模块使左右电机分别转动。汽车前照灯转向控制中心使用的是
ARM9处理器,它主要处理相关传感器的信息并根据相应的自适应算法计算出前照灯转角角度。系统的架构图如图1所示。
2 硬件设计硬件设计
2.1 CAN总线结点控制器模块
本模块设计中的CAN总线结点控制器模块主要是由FPGA、CAN总线控制器、CAN总线收发器和一些外围电路实现的。
CAN总线通信的是CAN总线控制器,由它完成CAN总线的通信协议,实现物理层和数据链路层的所有功能。CAN总线收发器
按照BOSCH CAN总线标准将0或1逻辑信号转换为标准中规定的电平。本设计中选用了MICroChip公司开发的CAN总线控制器
MCP2510和CAN总线收发器MCP2551.CAN总线结点控制器模块电路原理图如图2所示。
Microchip公司生产的MCP2510是一款控制器局域网络(CAN)协议控制器,完全支持CAN总线V2.0 A/B技术规范。该器
下载后可阅读完整内容,剩余3页未读,立即下载

weixin_38517212
- 粉丝: 8
- 资源: 952
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


