磁悬浮球控制技术:模糊算法与鲁棒性研究
需积分: 14 172 浏览量
更新于2024-09-07
收藏 134KB PDF 举报
"磁悬浮球模糊控制系统的研究"
本文深入探讨了磁悬浮球的模糊控制系统,旨在利用模糊控制技术来实现钢球的稳定悬浮。磁悬浮技术是一种依赖于磁场力保持物体定位的自动化技术,具有无摩擦、无污染、低能耗和高可靠性等优势。随着控制理论的进步,模糊控制作为一种先进的控制策略,能够提高磁悬浮系统的鲁棒性。
文章首先简述了磁悬浮技术的背景,强调了其在减少能量损耗和速度限制方面的优势,以及在各个领域的广泛应用。先进的控制方法,如自整定PID控制、定量反馈理论和模糊控制,已经被应用于磁悬浮系统的优化设计,以提升其性能和稳定性。
接着,文章详细介绍了磁悬浮球控制系统的构成和工作原理。系统主要包含铁芯、线圈、光电源、传感器、模糊控制器、功率放大器和钢球等组件。通过电磁力与钢球重量的平衡,钢球得以悬浮。然而,这种平衡状态是不稳定的,需要闭环控制以应对任何扰动。传感器检测钢球与电磁铁间的距离变化,并通过模糊控制器调节电磁铁的电流,以维持平衡。
模糊控制在此系统中的应用是关键。它允许控制器根据输入变量(如钢球位置的变化)的模糊集合理论来做出决策,这些决策基于一系列预定义的规则,以适应不确定性和非线性特性。模糊逻辑能够处理输入和输出的不确定性,提供更灵活的控制策略,增强系统的适应性。
实验设计中,作者构建了一个实用的模糊控制器,用于调整电磁铁的电流,从而精确调节电磁力。通过这种方式,即使在受到外部扰动时,也能迅速恢复钢球的悬浮状态。模糊控制的引入显著提高了系统的动态响应和稳定性。
磁悬浮球模糊控制系统的研究展示了模糊控制在解决复杂控制问题中的潜力,特别是在需要高度稳定性和鲁棒性的应用中。这一研究对于推动磁悬浮技术的发展,尤其是向智能化方向的迈进,具有重要意义。
文章编号: 1001— 9944( 2001) 01— 0026— 04
磁悬浮球模糊控制系统的研究
卢建华 ,刘爱元 ,唐大全
(山东烟台海军航空工程学院 自动控制系 ,山东烟台 264001)
摘 要: 本文介绍了磁悬浮球控制系统的结构及工作原理 ,提出利用模糊控 制技术实现钢球稳 定悬浮的算
法 ,并通过实验设计了实用的模糊控制器。
关键词: 磁悬浮 ; 模糊控制;鲁棒性
中图分类号: TP273
+
. 4 文献标识码: A
1 前言
磁悬浮技术属于自动控制技术 ,它是随着控
制技术的发展而建立起来的。 磁悬浮的作用是利
用磁场力使一物体沿着或绕着某一基准框架的一
轴或几轴保持固定位置。 由于磁悬体与支撑之间
没有任何接触 ,克服了由于摩擦带来的能量消耗
和速度限制 ,具有长寿命、无污染、无噪声、能耗
低、不受任何速度限制、安全可靠等优点 ,因此 ,目
前各国已广泛地开展磁悬浮控制系统与理论的研
究。随着控制理论的不断完善与发展 ,采用先进的
控制方法 ,如自整定 (
auto turning
)
PID
控制方法、
定 量反馈理论 ( quanti tative feedback theory )以
及模糊控制 ( f uzzy control)算法对磁悬浮系统进
行的控制和设计 ,使系统具有更好的鲁棒性。随着
电子技术 ,特别是电子计算机的高速发展 ,带来了
磁悬浮控制系统向智能化方向的快速发展。
2 磁悬浮球控制系统简介
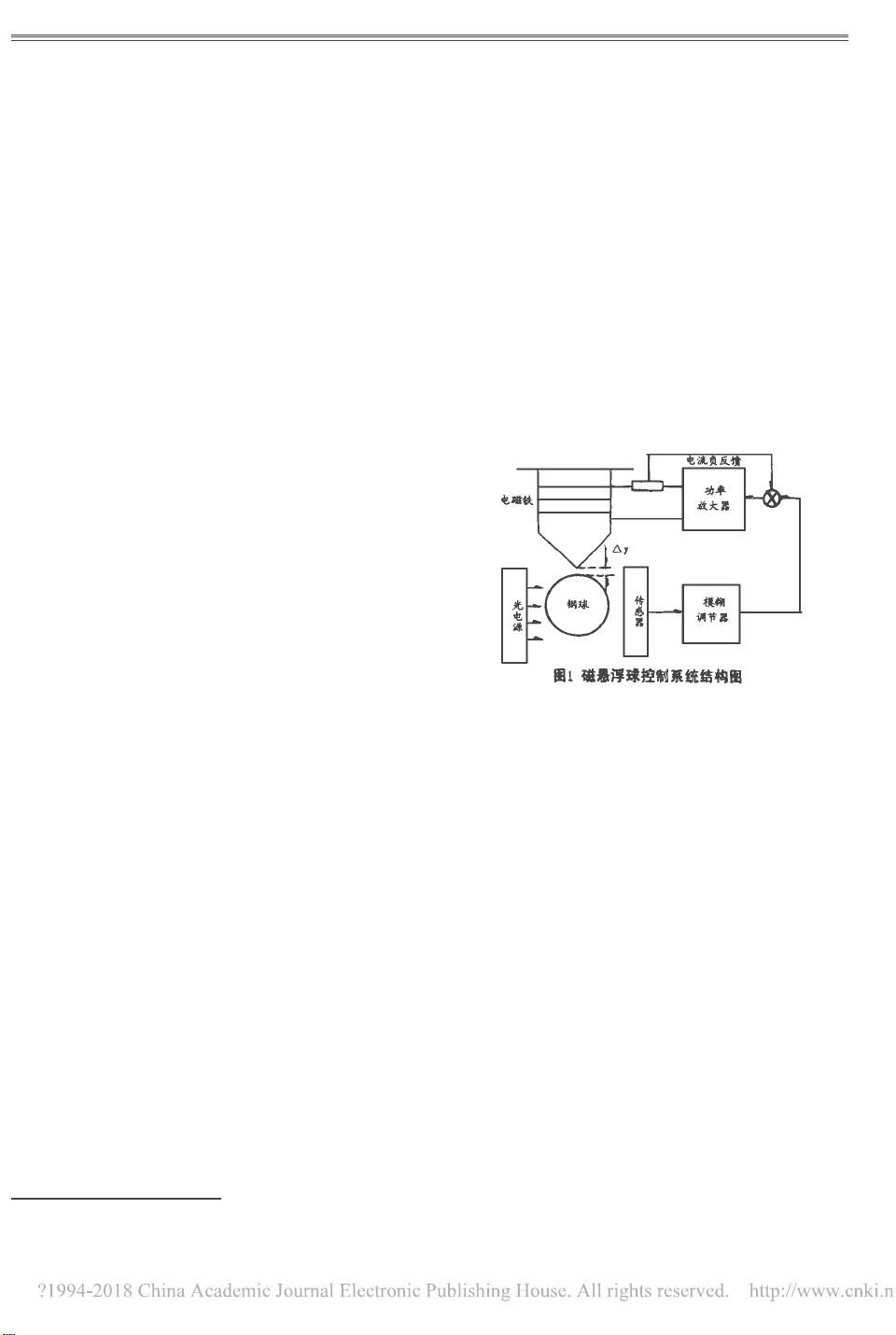
( 1) 系统结构
磁悬浮球控制系统由铁芯、线圈、光电源、传
感器、模糊控制器、功率放大器和被控对象钢球等
元器件组成。 如图 1所示。
( 2) 系统工作原理
电磁铁绕组中通以一定的电流会产生电磁
力 ,控制电磁铁绕组中的电流 ,使之产生的电磁力
与钢球的重量相平衡 ,钢球就可以悬浮在空中而
处于平衡状态。 但是这种平衡状态是一种不稳定
平衡 ,这是由于电磁铁与钢球之间的电磁力大小
与它们之间的距离 (Δy)成反比 ,只要平衡状态稍
微受到扰动 (如: 加在电磁铁线圈上的电压产生脉
动、周围的振动、风等 ) ,就会导致钢球掉下来或被
电磁铁吸住 ,因此必须对系统实现闭环控制。由光
电源和传感器组成的测量装置检测钢球与电磁铁
之间的距离变化 ,当钢球受到扰动下降 ,钢球与电
磁铁之间的距离 (
Δy
)增大 ,传感器所敏感的光强
增强 ,其输出电压增大 ,经调节器调节、功率放大
器放大处理后 ,使电磁铁控制绕组中的控制电流
相应增大 ,电磁力增大 ,钢球被吸回平衡位置。 反
之亦然。为了使钢球稳定地在空中悬浮 ,钢球在水
平方向上也应有一定的稳定范围。 为了解决这个
问题 ,把电磁铁铁芯指向钢球的一端作成锥体形 ,
当钢球在水平方向上偏离中心平衡位置时 ,电磁
力总是指向钢球表面的法向方向 ,此力可分解为
垂直方向和水平方向两个分量 ,水平方向分量使
钢球恢复到原中心位置。
从以上分析可知 ,该控制系统要实现对钢球
·26·
控制系统
收稿日期: 2000-07-18(磁盘稿 )
DOI : 10. 19557 /j . cnki . 1001 -9944. 2001. 01. 009
下载后可阅读完整内容,剩余3页未读,立即下载
2020-10-17 上传
2018-05-22 上传
2021-04-27 上传
2021-09-27 上传
2009-09-08 上传
点击了解资源详情
点击了解资源详情

icameling
- 粉丝: 59
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
