微分坐标驱动的三维网格几何变形进展
微分坐标三维网格几何变形是计算机图形学与几何建模领域的重要研究方向,尤其是在STAR-2005年的State-of-the-Art报告中,Olga Sorkine作为来自特拉维夫大学的计算机科学学院的研究者,对Laplacian网格处理框架及其在微分表示中的应用进行了深入探讨。这一框架的核心在于利用定义在多边形网格上的线性算子,如矩阵Laplacian,来支持一系列几何处理任务。
首先,论文强调了表面表示和处理在图形学中的关键地位,因为它们直接影响到可能的应用范围,包括但不限于形状近似、紧凑表示、网格编辑、水印嵌入和形变操作。这些应用依赖于对几何结构的精确控制和高效表示,而微分坐标正是实现这一目标的关键工具。微分坐标是一种基于网格Laplacian算子的新型坐标系统,它提供了更精细的局部信息,使得网格在保持全局一致性的同时,能够适应复杂的局部变形需求。
在具体的技术层面,微分坐标通过引入新的坐标系,允许网格中的每个顶点具有相对于其邻居的微小变化量,这有助于在保持形状稳定性的前提下进行平滑或非线性变换。此外,这些坐标还与网格的局部曲率和形状特性紧密关联,因此可以用于构建更精确的形状模型和分析。
论文关注的边界表示方法(Boundary Representations, BR)是几何建模的一个基础,特别是在处理复杂的几何对象时,BR允许以简洁的形式表示物体的拓扑结构和外部轮廓。在Laplacian处理框架中,BR与微分坐标相结合,能够提供一种高效且可扩展的方式来处理和优化复杂的三维网格,从而支持更广泛的实际应用,比如在游戏开发、建筑设计、动画制作和计算机辅助设计(CAD)等领域。
微分坐标三维网格几何变形的研究不仅深化了我们对图形几何的理解,也为实际的图形和几何处理技术带来了革新性的进展。通过利用Laplacian网格处理,研究人员能够设计出更具表现力和灵活性的模型,从而推动计算机图形学的发展和创新。
O. Sorkine / Laplacian Mesh Processing
(more equations than unknowns) and in general no exact so-
lution may exist. However, the system is full-rank and thus
has a unique solution in the least-squares sense:
˜
x = argmin
x
kLx − δ
(x)
k
2
+
∑
j∈C
ω
2
|x
j
− c
j
|
2
!
. (3)
The analytical least-squares solution is expressed in terms of
the rectangular (n + m) × n system matrix
˜
L from Eq. (2):
˜
x = (
˜
L
T
˜
L)
−1
˜
L
T
b,
where b = (δ ,ω c
1
,. . .,ω c
m
)
T
is the right-hand side vector
of the linear system. See Figure 3 for an example of a small
mesh and its associated matrix
˜
L.
An important practical aspect of surface reconstruction
from δ-coordinates is the availability of efficient and accu-
rate numerical methods for solving the least-squares prob-
lem (3). A recent comparative study [BBK05] shows that di-
rect methods prove to be superior for these types of problems
on moderately sized meshes (up to a few hundreds of thou-
sands of vertices). The system (3) can be solved by applying
Cholesky factorization to the associated normal equations
(
˜
L
T
˜
L)x =
˜
L
T
δ.
The matrix
˜
L is sparse, and M =
˜
L
T
˜
L is also sparse (al-
though not as sparse as
˜
L) and positive definite. By using
fill-reducing reordering, it is possible to compu te a sparse
Cholesky factorization of M:
M = R
T
R,
where R is an upper-triangular sparse matrix. The factoriza-
tion is computed once, and we can solve for several mesh
functions ( x, y and z) by back substitution:
R
T
ξ =
˜
L
T
δ
(x)
Rx = ξ .
The factorization takes the bulk of the computation time,
and the back-substitution step is usually very fast. Using ad-
vanced linear solvers, such as TAUCS library [
Tol03], makes
the computations very efficient. See Table 1 for timing data
on several typical meshes. Another important advantage of
direct solvers is the separation between the matrix process-
ing (factorization) and the right-hand side, which is only in-
volved in the fast back-substitution step. This permits fre-
quently changing the right-hand sides at the price of the fac-
torization pre-process which is done only once per fixed ma-
trix. This property is extremely useful for interactive mesh
editing, as described in Section 4. When the system ma-
trix is very large (million variables and more), the size of
the factor becomes too large to fit into memory. In this
case, it is possible to either use the out-of-core version of
Cholesky factorization (available e.g. with [Tol03]) or iter-
ative solvers whose complexity scales linearly with the size
of the system (for instance, see the recent work on multigrid
solvers [AKS05, SYBF06]).
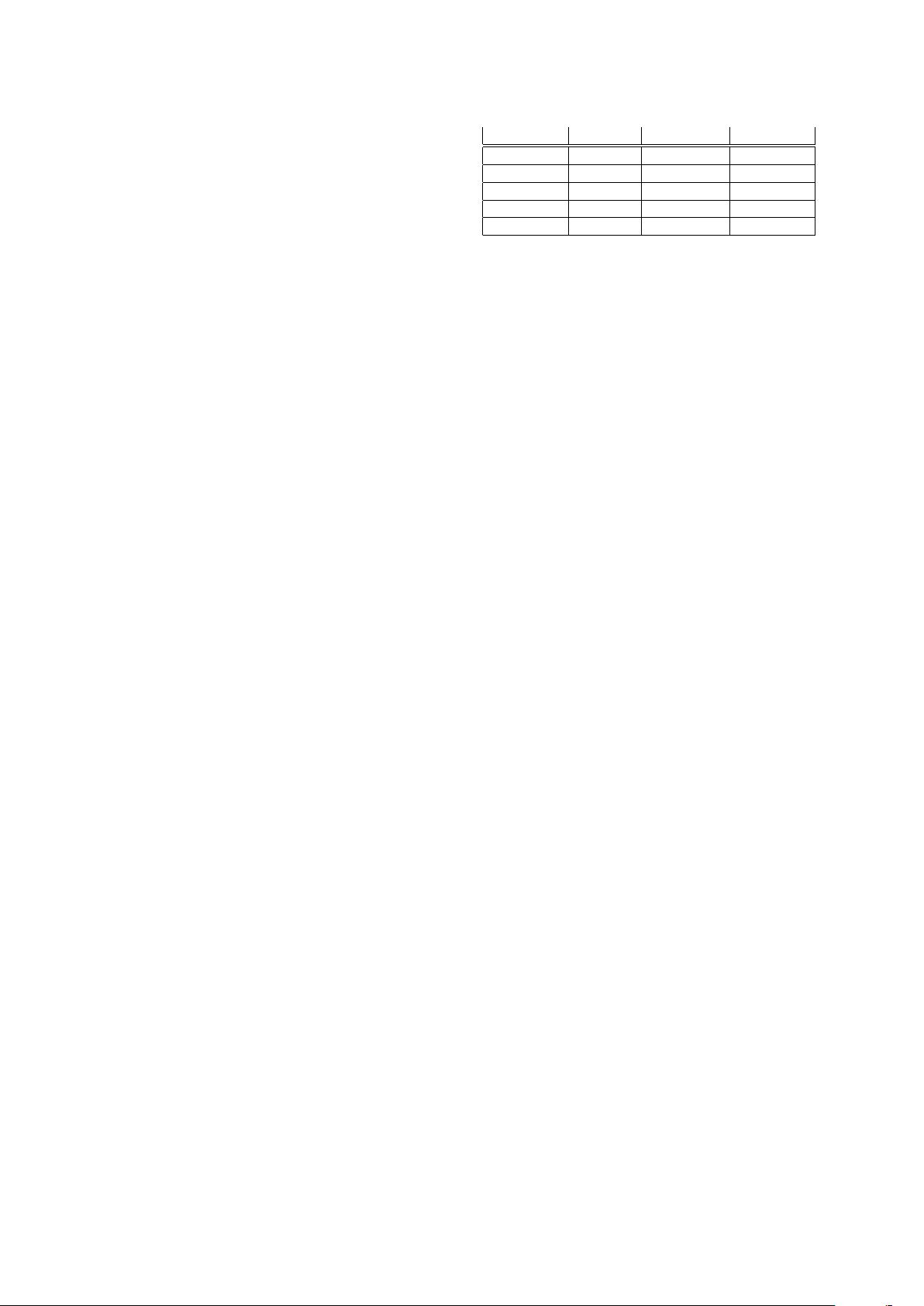
Model # vertices Factor (sec.) Solve (sec.)
Eight 2718 0.085 0.004
Horse 19851 0.900 0.032
Camel 39074 2.096 0.073
Feline 49864 2.750 0.110
Max Planck 100086 7.713 0.240
Table 1: Time measurements of manipulations of the (ex-
tended) Laplacian matrices for several typical meshes, on
a 3.4 GHz Pentium 4 computer. Factorization stands for
Cholesky factorization of
˜
L
T
˜
L and Solve denotes solving by
back-substitution for one mesh function.
Note that the accuracy of the solution is highly depen-
dent on the conditioning of the linear system. The Lapla-
cian matrix is notoriously ill-conditioned: when we add
only one anchor, the largest singular value of
˜
L is propor-
tional to the maximal degree in the mesh, while a good es-
timate for the smallest singular value is one over the prod-
uct of the maximum topological distance of a vertex from
the single anchor vertex, and the number of vertices in the
mesh [BH01, GM00]. For a typical n-vertex 3D mesh, the
condition number is therefore likely to be Θ(n
−1.5
), and it is
squared when we consider the normal equations. However,
adding anchors to the system improves its conditioning and
makes the factorization of the normal equations stable. A
rigorous way to bound the smallest singular value of
˜
L from
below is shown in [CCOST05]; the bound depends on the
number of anchors and their spacing across the mesh.
In summary, the transition from the global Cartesian rep-
resentation to differential representation is performed by a
linear operator with local support: the mesh Laplacian. And
vice versa: in order to recover the Cartesian coordinates
from the differential representation, one needs to solve a
sparse linear least-squares problem. This provides a power-
ful framework for surface manipulation: we will apply dif-
ferent modifications to the differential coordinates (such as
quantization for compression purposes) and/or pose addi-
tional modeling constraints, and then reconstruct the surface
by solving the least-squares problem. The advantages of this
framework can be summarized as follows:
• It strives to preserve local surface detail as much as possi-
ble under the constraints
• The least-squares solution smoothly distributes the error
across the entire domain, providing a graceful reconstruc-
tion
• Sparse linear systems can be solved very efficiently
2.3. Spectral properties
Let us consider the L
s
matrix, since it is symmetric and
thus simpler to analyze. The matrix L
s
is symmetric positive
c
The Eurographics Association 2005.
剩余17页未读,继续阅读
2017-11-10 上传
2021-10-03 上传
2023-05-18 上传
2023-11-19 上传
2023-06-07 上传
2023-05-05 上传
2023-11-29 上传
2023-09-08 上传
2023-08-13 上传

suzhuo123456
- 粉丝: 1
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 十种常见电感线圈电感量计算公式详解
- 军用车辆:CAN总线的集成与优势
- CAN总线在汽车智能换档系统中的作用与实现
- CAN总线数据超载问题及解决策略
- 汽车车身系统CAN总线设计与应用
- SAP企业需求深度剖析:财务会计与供应链的关键流程与改进策略
- CAN总线在发动机电控系统中的通信设计实践
- Spring与iBATIS整合:快速开发与比较分析
- CAN总线驱动的整车管理系统硬件设计详解
- CAN总线通讯智能节点设计与实现
- DSP实现电动汽车CAN总线通讯技术
- CAN协议网关设计:自动位速率检测与互连
- Xcode免证书调试iPad程序开发指南
- 分布式数据库查询优化算法探讨
- Win7安装VC++6.0完全指南:解决兼容性与Office冲突
- MFC实现学生信息管理系统:登录与数据库操作
