Matlab中神经网络与模糊LQR控制倒立摆源码解析
"matlab神经网络、模糊和LQR控制一级、二级、三级倒立摆源码"
这篇资源主要涉及的是使用Matlab进行控制系统的仿真,具体是针对一级、二级和三级倒立摆的控制设计。倒立摆是一种复杂的非线性系统,控制起来具有挑战性,因为它很容易因为微小的扰动而失去平衡。该资源提供的实验报告包含了使用神经网络、模糊逻辑和线性二次最优(LQR)控制器的设计与仿真。
1. 模糊控制:
- 对于一级倒立摆,实验要求设计一个模糊控制器,目标是使倒立摆达到稳定状态。模糊控制器设计的关键在于定义输入(误差E和误差变化率EC)和输出(控制信号U)的模糊集,以及相应的隶属函数。在本例中,选择了三角形的隶属度函数,并将论域设置为对称的(-6,6)。通过一系列模糊规则(如"如果E是负大,则U应是正大"等)和推理方法(Mamdani推理),实现对倒立摆的控制。去模糊化采用重心法将模糊输出转换为实际控制信号。
2. 神经网络控制:
- 一级倒立摆的神经网络控制器设计同样旨在稳定系统。神经网络因其自适应能力和非线性映射能力,被广泛用于控制复杂系统。实验要求包括神经网络控制器的构建和仿真,展示神经网络如何学习和调整权重以适应系统动态。报告中可能包含网络结构、训练过程和仿真结果的曲线图,以展示控制性能。
3. 二级和三级倒立摆控制:
- 二级和三级倒立摆的控制进一步增加了难度,因为它们有更多的自由度和更高的动态复杂性。同样是基于神经网络的控制器设计,但可能需要更复杂的网络结构和更多的训练数据。报告中会给出这些倒立摆的控制策略和仿真结果,以证明神经网络控制的有效性。
4. LQR控制:
- 三级倒立摆的控制还涉及到LQR控制器的设计。LQR是一种基于数学优化的方法,寻找最小化系统性能指标(如能量消耗或状态偏差平方和)的控制输入。LQR控制器的优点是计算效率高,适用于线性系统,但对非线性系统可能表现有限。报告中会介绍如何设置LQR控制器的参数,以及仿真结果。
5. 其他说明:
- 报告中可能还包括对实验的总结、存在的问题、改进方向以及对教授的感谢等内容。
这个资源对于学习控制理论和Matlab仿真技术的学生非常有价值,因为它提供了实际应用的例子,涵盖了从传统控制(模糊)到现代控制(神经网络和LQR)的多种方法。同时,它也提供了实验验证和动画演示,有助于深入理解各种控制策略的效果。
PB ZE NS NS NM NM NB NB
5. 推理方法采用‘mamdani’推理方法。
6. 去模糊化方法采用重心法。
3.仿真结果及分析
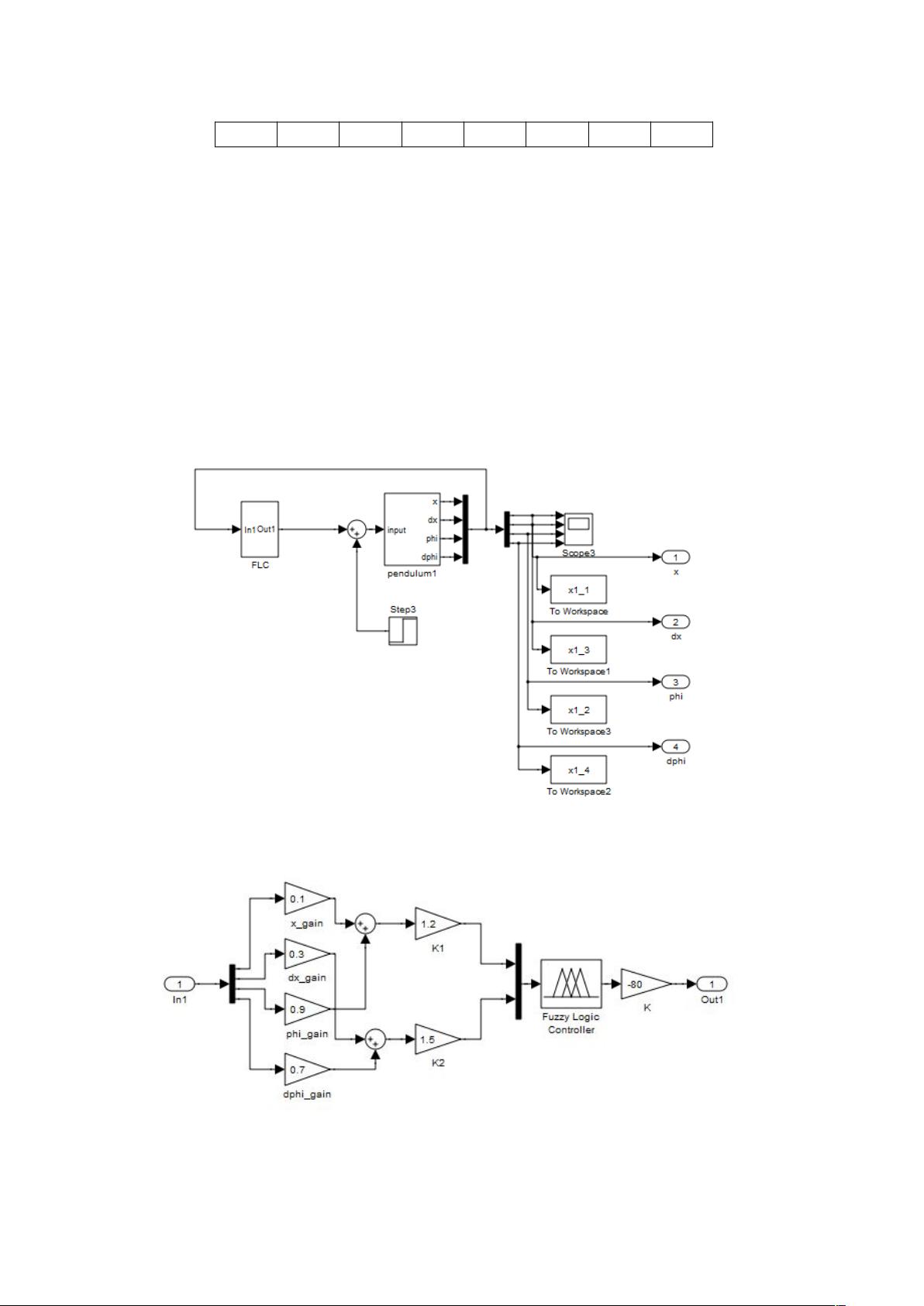
模糊控制结构图及参数调整
(1)
(2)
图 2.一阶倒立摆模糊控制系统结构
4
剩余15页未读,继续阅读
2023-12-28 上传
2024-04-17 上传
2023-07-22 上传
2023-07-02 上传
2023-03-26 上传
2023-09-05 上传

lrnuaa
- 粉丝: 3
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 最优条件下三次B样条小波边缘检测算子研究
- 深入解析:wav文件格式结构
- JIRA系统配置指南:代理与SSL设置
- 入门必备:电阻电容识别全解析
- U盘制作启动盘:详细教程解决无光驱装系统难题
- Eclipse快捷键大全:提升开发效率的必备秘籍
- C++ Primer Plus中文版:深入学习C++编程必备
- Eclipse常用快捷键汇总与操作指南
- JavaScript作用域解析与面向对象基础
- 软通动力Java笔试题解析
- 自定义标签配置与使用指南
- Android Intent深度解析:组件通信与广播机制
- 增强MyEclipse代码提示功能设置教程
- x86下VMware环境中Openwrt编译与LuCI集成指南
- S3C2440A嵌入式终端电源管理系统设计探讨
- Intel DTCP-IP技术在数字家庭中的内容保护
