KinectFusion实时三维重建与跟踪技术解析
需积分: 12 64 浏览量
更新于2024-09-11
1
收藏 7.88MB PDF 举报
"KinectFusion是实时稠密表面映射和跟踪的经典入门教程,适合三维重建学习者。本文档详细介绍了使用Kinect深度相机在没有其他传感基础设施的情况下,如何实时生成高质量的3D重建结果。"
正文:
KinectFusion(简称KF)是一种创新的三维重建技术,它允许用户通过手持式Kinect深度相机实现实时的、稠密的表面映射和跟踪。这项技术由Richard A. Newcombe等人在2011年提出,主要应用于室内环境的精确实时建模,即使在变化的光照条件下也能保持高精度。通过结合微软Kinect传感器提供的连续深度数据流,KinectFusion能够构建一个全局一致的、无缝的3D模型。
**1. 实时性与稠密性**
KinectFusion的核心在于其实时处理能力,这意味着系统可以在物体或场景移动的同时进行重建,无需后期处理。此外,该技术强调“稠密”表面映射,意味着重建的模型不仅包含关键特征点,而是包含了场景中的每一个像素,提供详尽的3D信息。
**2. 低成本硬件**
与传统的高精度3D扫描系统相比,KinectFusion依赖于低成本的设备——Kinect深度相机。这种相机能捕获场景的深度信息,并将其转化为点云数据。配合普通的图形硬件,KinectFusion就能实现高效的数据融合和处理。
**3. 数据融合**
系统通过一种称为“数据融合”的过程整合来自Kinect传感器的连续深度数据流。这涉及到将每一帧的深度信息与之前构建的3D模型进行比较和融合,不断更新和优化模型,从而减少噪声和不完整性。
**4. SLAM(Simultaneous Localization And Mapping,同时定位与建图)**
KinectFusion也与SLAM算法密切相关。SLAM是机器人领域的一项关键技术,目标是在未知环境中同时估计机器人位置和环境地图。在KinectFusion中,SLAM算法用于确定相机的运动轨迹,以便正确地将新获取的深度数据与现有模型对齐。
**5. 图形硬件加速**
为了实现实时性能,KinectFusion利用了GPU(图形处理器)的并行计算能力。通过将计算任务分解到大量的并行处理单元,GPU可以快速处理大量数据,使得复杂的3D重建得以在短时间内完成。
**6. 应用场景**
这项技术有广泛的应用前景,包括但不限于室内导航、虚拟现实、增强现实、游戏开发、文化遗产保护、建筑建模等。例如,它可以用于创建高精度的室内地图,帮助机器人自主导航;在虚拟现实应用中,它可以实时构建用户的交互环境,提升体验。
KinectFusion是计算机视觉和机器人学领域的重要进展,它将实时3D重建技术带入了大众视野,极大地推动了相关领域的研究和发展。通过深入理解并实践KinectFusion,开发者和研究人员能够更好地掌握三维空间的理解和重建,为各种创新应用打下基础。
KinectFusion: Real-Time Dense Surface Mapping and Tracking
∗
Richard A. Newcombe
Imperial College London
Shahram Izadi
Microsoft Research
Otmar Hilliges
Microsoft Research
David Molyneaux
Microsoft Research
Lancaster University
David Kim
Microsoft Research
Newcastle University
Andrew J. Davison
Imperial College London
Pushmeet Kohli
Microsoft Research
Jamie Shotton
Microsoft Research
Steve Hodges
Microsoft Research
Andrew Fitzgibbon
Microsoft Research
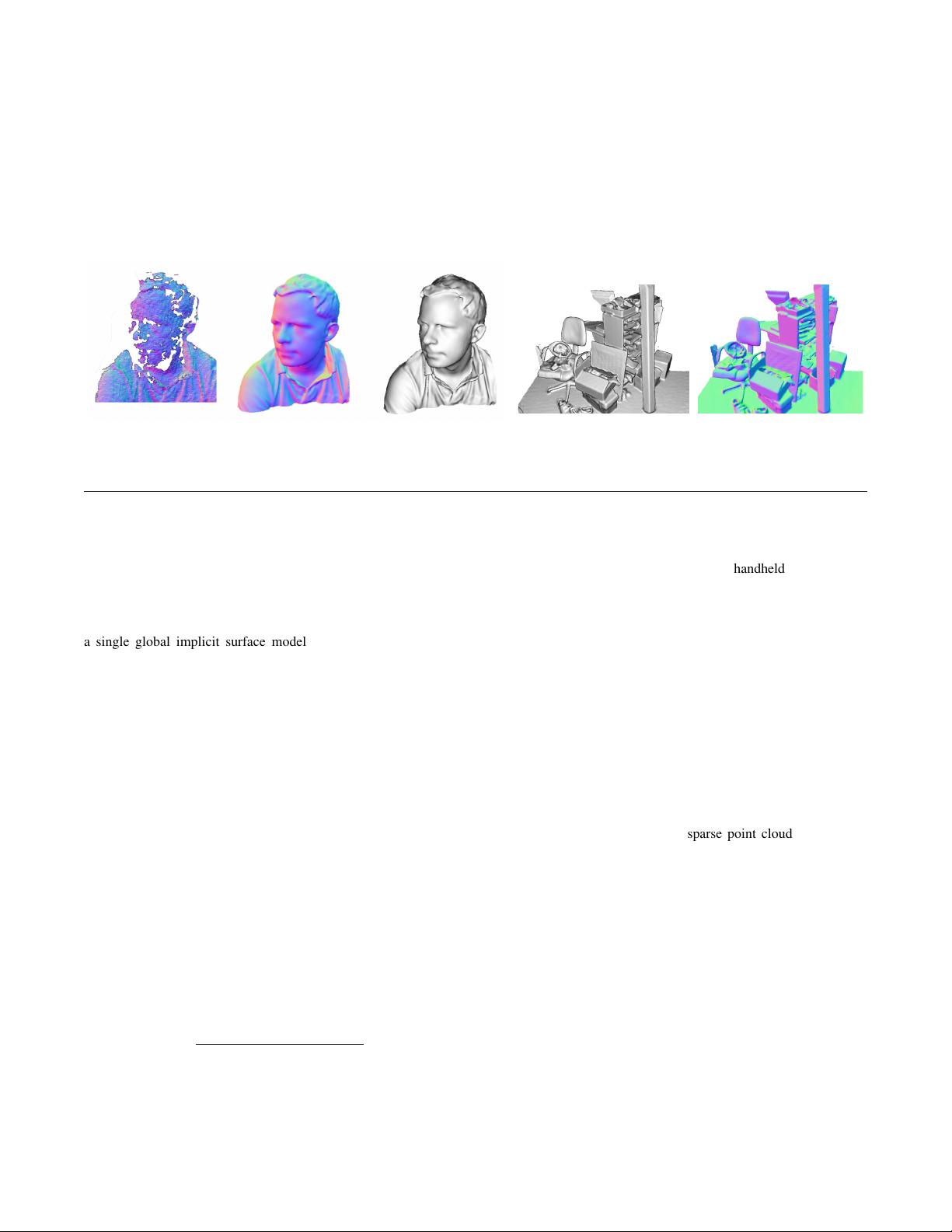
Figure 1: Example output from our system, generated in real-time with a handheld Kinect depth camera and no other sensing infrastructure.
Normal maps (colour) and Phong-shaded renderings (greyscale) from our dense reconstruction system are shown. On the left for comparison
is an example of the live, incomplete, and noisy data from the Kinect sensor (used as input to our system).
ABSTRACT
We present a system for accurate real-time mapping of complex and
arbitrary indoor scenes in variable lighting conditions, using only a
moving low-cost depth camera and commodity graphics hardware.
We fuse all of the depth data streamed from a Kinect sensor into
a single global implicit surface model of the observed scene in
real-time. The current sensor pose is simultaneously obtained by
tracking the live depth frame relative to the global model using a
coarse-to-fine iterative closest point (ICP) algorithm, which uses
all of the observed depth data available. We demonstrate the advan-
tages of tracking against the growing full surface model compared
with frame-to-frame tracking, obtaining tracking and mapping re-
sults in constant time within room sized scenes with limited drift
and high accuracy. We also show both qualitative and quantitative
results relating to various aspects of our tracking and mapping sys-
tem. Modelling of natural scenes, in real-time with only commod-
ity sensor and GPU hardware, promises an exciting step forward
in augmented reality (AR), in particular, it allows dense surfaces to
be reconstructed in real-time, with a level of detail and robustness
beyond any solution yet presented using passive computer vision.
Keywords: Real-Time, Dense Reconstruction, Tracking, GPU,
SLAM, Depth Cameras, Volumetric Representation, AR
Index Terms: I.3.3 [Computer Graphics] Picture/Image Genera-
tion - Digitizing and Scanning; I.4.8 [Image Processing and Com-
puter Vision] Scene Analysis - Tracking, Surface Fitting; H.5.1
[Information Interfaces and Presentation]: Multimedia Information
Systems - Artificial, augmented, and virtual realities
∗
This work was performed at Microsoft Research.
1 INTRODUCTIO N
Real-time infrastructure-free tracking of a handheld camera whilst
simultaneously mapping the physical scene in high-detail promises
new possibilities for augmented and mixed reality applications.
In computer vision, research on structure from motion (SFM)
and multi-view stereo (MVS) has produced many compelling re-
sults, in particular accurate camera tracking and sparse reconstruc-
tions (e.g. [10]), and increasingly reconstruction of dense surfaces
(e.g. [24]). However, much of this work was not motivated by real-
time applications.
Research on simultaneous localisation and mapping (SLAM) has
focused more on real-time markerless tracking and live scene re-
construction based on the input of a single commodity sensor—a
monocular RGB camera. Such ‘monocular SLAM’ systems such as
MonoSLAM [8] and the more accurate Parallel Tracking and Map-
ping (PTAM) system [17] allow researchers to investigate flexible
infrastructure- and marker-free AR applications. But while these
systems perform real-time mapping, they were optimised for ef-
ficient camera tracking, with the sparse point cloud models they
produce enabling only rudimentary scene reconstruction.
In the past year, systems have begun to emerge that combine
PTAM’s handheld camera tracking capability with dense surface
MVS-style reconstruction modules, enabling more sophisticated
occlusion prediction and surface interaction [19, 26]. Most recently
in this line of research, iterative image alignment against dense re-
constructions has also been used to replace point features for cam-
era tracking [20]. While this work is very promising for AR, dense
scene reconstruction in real-time remains a challenge for passive
monocular systems which assume the availability of the right type
of camera motion and suitable scene illumination.
But while algorithms for estimating camera pose and extract-
ing geometry from images have been evolving at pace, so have
the camera technologies themselves. New depth cameras based ei-
ther on time-of-flight (ToF) or structured light sensing offer dense
measurements of depth in an integrated device. With the arrival
of Microsoft’s Kinect, such sensing has suddenly reached wide
consumer-level accessibility. The opportunities for SLAM and AR
下载后可阅读完整内容,剩余9页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2015-10-17 上传
2019-10-16 上传
2023-11-20 上传
2024-05-31 上传
2018-11-24 上传
2013-04-12 上传

qq_29116291
- 粉丝: 0
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- vcworks 5.4 技术文档
- TCP-IP Sockets in Java - Practical Guide for Programmers [Academic-Press 2002, Scan].pdf
- PHP实战(英文高清版)
- 大型网站架构演变和知识体系.pdf
- PHP面向对象编程(英文原版高清)
- C语言设计.第三版.谭浩强.
- IT 管理需求分析说明书
- flex 中文开发文档,基本原理和应用
- 网络教程(服务器)服务器
- Keil实例教程.pdf
- Linux内核结构详解教程.pdf
- CSS+DIV布局大全
- DWR基本原理、编程方法和例子
- 报表工具 xx x
- MYSQL中文乱码 xx
- 基于数码相机的三维物体空间几何位置的摄影测量
