实测实量操作指南:土建工程质量控制详解
版权申诉
53 浏览量
更新于2024-07-07
收藏 264KB DOC 举报
"《实测实量操作指引土建.doc》是一份详细的工程质量控制手册,主要针对土建领域的混凝土结构工程、砌筑工程、抹灰工程、防水工程以及入户门和铝合金门窗安装工程。该文档旨在规范实测实量的过程,确保施工质量的标准化和一致性。
首先,章节一概述了实测实量的目的,强调通过规范化的程序、取样原则(如选择代表性样本,避免人为误差)来提升测量精度和数据可靠性。其适用范围广泛,覆盖海伦堡集团的所有在建工程项目,从结构基础到交付前的全过程。
混凝土结构工程部分详细阐述了各项关键参数的检测,如截面尺寸偏差、表面平整度、垂直度、楼板厚度偏差等,以及施工控制线设置的重要性。例如,外墙垂直度和建筑物周边方正度的控制,以保证建筑的几何精度。
砌筑工程部分着重于表面平整度、垂直度、方正度和门窗洞口尺寸偏差的检测,还涉及预制或现浇构件的检查和砌筑工序的规范。这些都关系到砌体结构的整体质量。
抹灰工程部分同样关注表面平整度、垂直度、阴阳角方正度等,以及房间尺寸偏差和门窗洞尺寸偏差的控制。裂缝和空鼓是重点关注的缺陷,而表观质量则是衡量整体效果的重要指标。
防水工程则明确了卫生间涂膜厚度、附加防水层设置、地下室和屋顶防水的要求,确保防水系统的完整性。
入户门和铝合金门窗安装工程部分,包括门框垂直度、门扇与地面留缝宽度等关键安装标准,以及型材拼缝、垂直度和固定等细节要求,保证门窗的安装精度。
最后,文档提供了相关的记录表、计分表、汇总表和分析表,用于记录实测数据、评分和质量控制结果的整理与分析,以便及时发现和纠正问题,提高施工项目的管理水平。
《实测实量操作指引土建.doc》是一个实用的工具,为土建施工过程中的质量控制提供了明确的操作指南,有助于提升建筑工程的质量标准和一致性,降低质量问题的发生。"
.
5 / 26
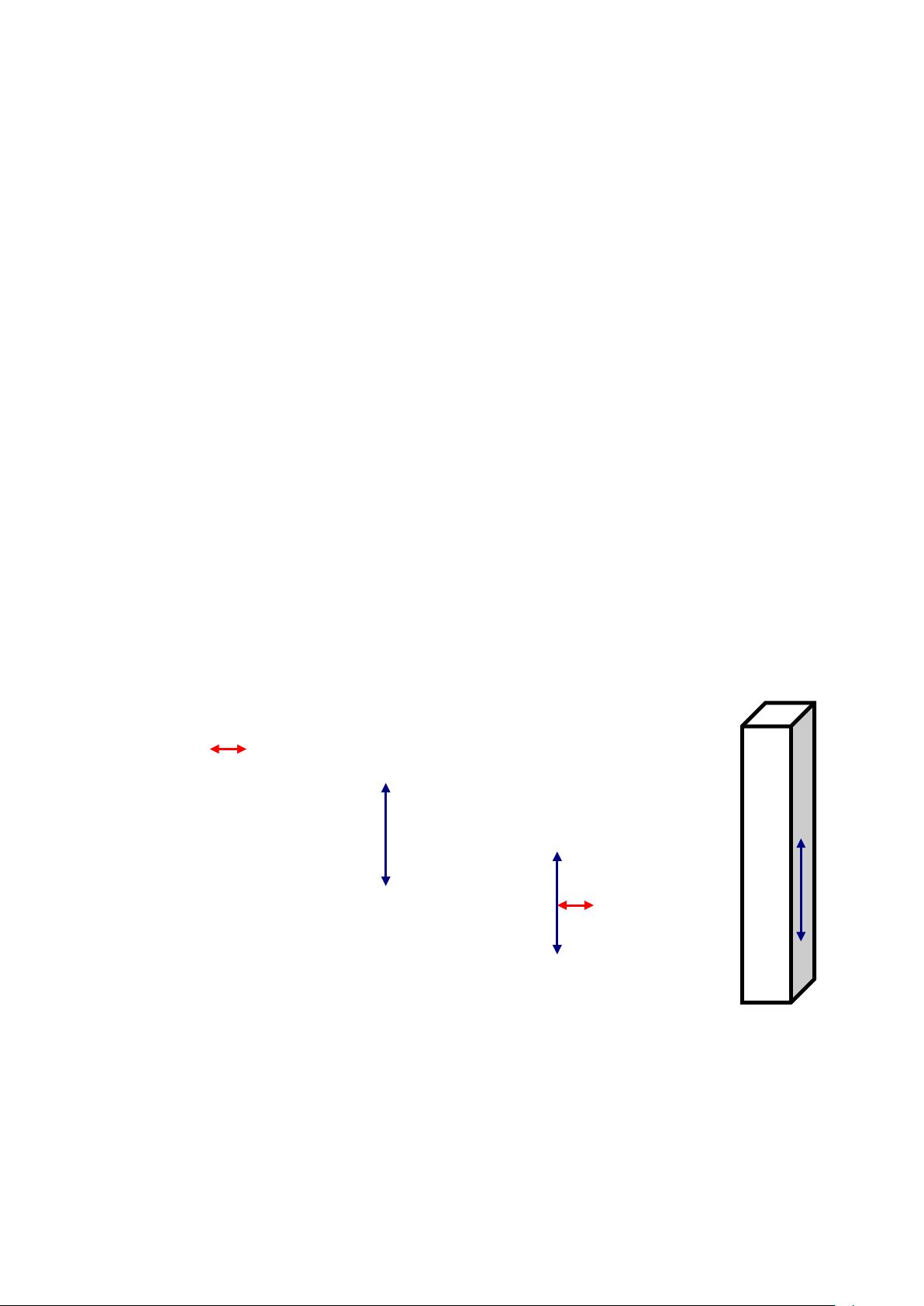
1. 指 标 说 明 : 反 映 层 高 范 围 内 剪 力 墙 、 砼 柱 表 面 垂 直 的 程 度 。
2. 合 格 标 准 : [0,8]mm
3. 测 量 工 具 : 2米 靠 尺
4. 测 量 方 法 和 数 据 记 录 :
1) 剪 力 墙 : 任 取 长 边 墙 的 一 面 作 为 1个 实 测 区 。 累 计 实 测 实 量 20个 实 测 区 。
2) 当 墙 长 度 小 于 3米 时 ,同 一 面 墙 距 两 端 头 竖 向 阴 阳 角 约 30cm位 置 ,分 别 按 以 下 原
则 实 测 2次 : 一 是 靠 尺 顶 端 接 触 到 上 部 砼 顶 板 位 置 时 测 1次 垂 直 度 ,二 是 靠 尺 底 端
接 触 到 下 部 地 面 位 置 时 测 1次 垂 直 度 。 砼 墙 体 洞 口 一 侧 为 垂 直 度 必 测 部 位 。 这 2
个 实 测 值 分 别 作 为 判 断 该 实 测 指 标 合 格 率 的 2个 计 算 点 。
3) 当 墙 长 度 大 于 3米 时 ,同 一 面 墙 距 两 端 头 竖 向 阴 阳 角 约 30cm和 墙 中 间 位 置 ,分 别
按 以 下 原 则 实 测 3次 : 一 是 靠 尺 顶 端 接 触 到 上 部 砼 顶 板 位 置 时 测 1次 垂 直 度 ,二 是
靠 尺 底 端 接 触 到 下 部 地 面 位 置 时 测 1次 垂 直 度 ,三 是 在 墙 长 度 中 间 位 置 靠 尺 基 本
在 高 度 方 向 居 中 时 测 1次 垂 直 度 。 砼 墙 体 洞 口 一 侧 为 垂 直 度 必 测 部 位 。 这 3个 实
测 值 分 别 作 为 判 断 该 实 测 指 标 合 格 率 的 3个 计 算 点 。
4) 砼 柱 : 任 选 砼 柱 四 面 中 的 两 面 ,分 别 将 靠 尺 顶 端 接 触 到 上 部 砼 顶 板 和 下 部 地 面 位
置 时 各 测 1次 垂 直 度 。这 2个 实 测 值 分 别 作 为 判 断 该 实 测 指 标 合 格 率 的 2个 计 算 点 。
5.示 例 :
第 五 节 顶 板 水 平 度 极 差 〔 砼 结 构
1. 指 标 说 明 : 考 虑 实 际 测 量 的 可 操 作 性 ,选 取 同 一 功 能 房 间 砼 顶 板 内 四 个 角 点 和 一 个
中 点 距 离 同 一 水 平 基 准 线 之 间 5个 实 测 值 的 极 差 值 ,综 合 反 映 同 一 房 间 砼 顶 板 的 平
整 程 度 。
2. 合 格 标 准 : [0,10]mm
3. 测 量 工 具 : 激 光 扫 平 仪 、 具 有 足 够 刚 度 的 5米 钢 卷 尺 〔 或 2米 靠 尺 、 激 光 测 距 仪
第三尺
第二尺
300m
m
300mm
〔大于 3 米
第一尺
砼墙柱垂直度实测示意图
第一尺
第二尺

剩余25页未读,继续阅读
2021-10-06 上传
2021-10-11 上传
2024-09-05 上传
2024-09-05 上传
2024-09-05 上传
2024-09-05 上传

huayuya123
- 粉丝: 26
- 资源: 31万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多模态联合稀疏表示在视频目标跟踪中的应用
- Kubernetes资源管控与Gardener开源软件实践解析
- MPI集群监控与负载平衡策略
- 自动化PHP安全漏洞检测:静态代码分析与数据流方法
- 青苔数据CEO程永:技术生态与阿里云开放创新
- 制造业转型: HyperX引领企业上云策略
- 赵维五分享:航空工业电子采购上云实战与运维策略
- 单片机控制的LED点阵显示屏设计及其实现
- 驻云科技李俊涛:AI驱动的云上服务新趋势与挑战
- 6LoWPAN物联网边界路由器:设计与实现
- 猩便利工程师仲小玉:Terraform云资源管理最佳实践与团队协作
- 类差分度改进的互信息特征选择提升文本分类性能
- VERITAS与阿里云合作的混合云转型与数据保护方案
- 云制造中的生产线仿真模型设计与虚拟化研究
- 汪洋在PostgresChina2018分享:高可用 PostgreSQL 工具与架构设计
- 2018 PostgresChina大会:阿里云时空引擎Ganos在PostgreSQL中的创新应用与多模型存储
