PIC12F510/16F506中文数据手册 - Microchip单片机
"PIC12F510-16F506_中文数据手册.pdf"
这份PDF数据手册详细介绍了PIC12F510和16F506这两款8位微控制器,由Microchip Technology Inc.发布。手册为中文版,方便中国用户阅读理解,同时也提醒读者不要忽略英文部分,因为英文版包含了更多关于产品性能和技术细节的重要信息。
PIC12F510和16F506是8引脚的单片机,属于Microchip的低引脚数系列,拥有8位处理能力。它们集成了闪存存储器,适用于各种嵌入式控制应用。数据手册通常会包含以下关键内容:
1. **器件概述**:介绍微控制器的基本特性和功能,如CPU架构、内存配置(如程序存储空间、RAM)、输入/输出端口(I/O)、定时器、计数器、中断系统等。
2. **电气特性**:列出微控制器的工作电压范围、电流消耗、电源管理选项等电气参数,以确保设计时满足硬件要求。
3. **封装和引脚排列**:描述了芯片的物理封装形式和各引脚的功能,帮助工程师进行PCB布局。
4. **指令集**:详述了微控制器支持的指令集,包括每条指令的操作、周期和用途,是编程的基础。
5. **开发工具**:可能会提及Microchip的开发工具,如MPLAB IDE和PICkit,以及编程器和仿真器,用于编写、调试和烧录代码。
6. **应用示例**:提供一些典型的应用场景和电路设计,帮助开发者快速上手。
7. **限制与责任声明**:手册中明确指出,Microchip不对因使用手册信息或器件产生的任何问题承担责任,特别是对于生命维持和生命安全应用,风险由购买者承担。同时,Microchip的知识产权受到法律保护,未经许可,不能转让任何许可证。
8. **商标与版权**:列出了Microchip的相关商标和版权信息,强调了Microchip在微控制器领域的品牌价值。
在实际使用中,开发者需要结合此手册与Microchip的英文原版文档一起参考,确保设计方案符合微控制器的技术规格,并遵循所有的安全和法律要求。对于涉及生命安全的项目,额外的安全评估和验证是必要的。此外,开发者还需要了解Microchip的软件开发环境和流程,以便高效地开发和调试基于PIC12F510和16F506的嵌入式系统。
PIC12F510/16F506
DS41268A_CN 第 14 页 初稿 2006 Microchip Technology Inc.
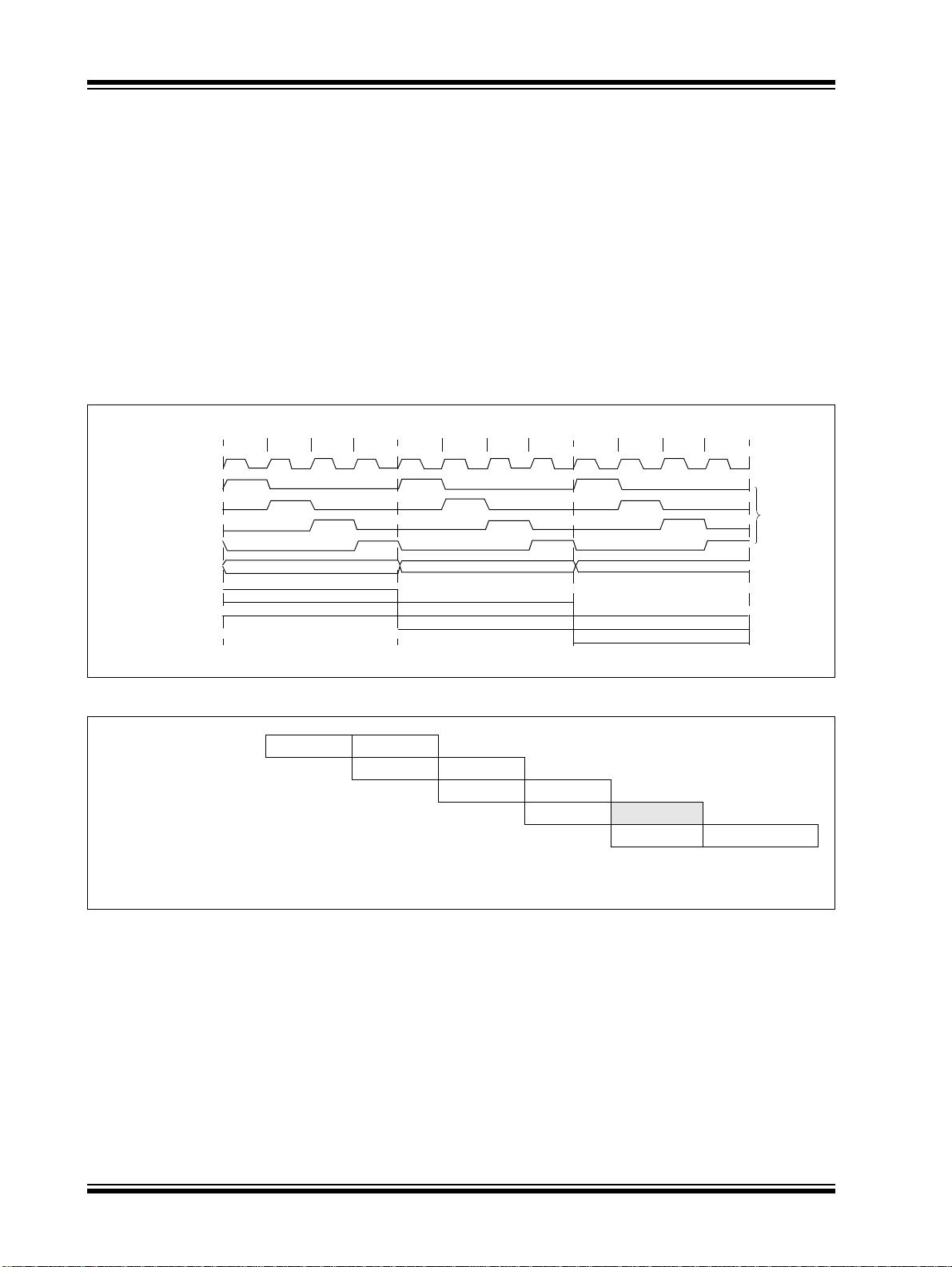
3.1 时钟机制 / 指令周期
由OSC1/CLKIN引脚输入的时钟信号在器件内部被四分
频后,产生四个不重叠的正交时钟节拍,称为 Q1、Q2、
Q3 和 Q4。在每个 Q1 节拍,PC 递增;在 Q4 节拍从程
序存储器取指并将指令锁存到指令寄存器。指令的译码
和执行是在下一个 Q1 到 Q4 节拍中完成的。图 3-3 和
例 3-1 所示为时钟和指令执行流程。
3.2 指令流 / 流水线
一个指令周期由四个 Q 节拍组成 (Q1、 Q2、 Q3 和
Q4)。取指和执行指令是流水线操作的,因此取指需要
一个指令周期,而译码和执行指令则需要另一个指令周
期。但由于是流水线操作,所以每条指令的有效执行时
间都是一个指令周期。如果一条指令导致 PC 改变 (如
GOTO),则执行该指令需要两个周期 (例 3-1)。
取指周期由 Q1 节拍中 PC 加 1 开始。
在执行周期中,在 Q1 节拍将所取指令锁存到指令寄存
器(Instruction Register, IR)中。然后在 Q2、 Q3 和
Q4 节拍中对该指令译码并执行指令。其中读数据存储
器 (读操作数)发生在 Q2 节拍,写操作发生在 Q4 节
拍 (写目标单元)。
图 3-3:时钟/ 指令周期
例 3-1: 指令流水线
Q1
Q2 Q3 Q4
Q1
Q2 Q3 Q4
Q1
Q2 Q3 Q4
OSC1
Q1
Q2
Q3
Q4
PC
PC
PC + 1 PC + 2
取指(PC)
执行指令(PC – 2)
取指(PC + 1)
执行指令(PC)
取指(PC + 2)
执行指令(PC + 1)
内部
相位
时钟
除程序转移指令之外,所有指令都是单周期指令。由于程序转移指令将导致一条已取指令从流水线清除,需要重新
取指,然后执行指令,所以程序转移指令需要两个周期。
1. MOVLW 03H
取指 1 执行 1
2. MOVWF PORTB
取指 2 执行 2
3. CALL SUB_1
取指 3 执行 3
4. BSF PORTB, BIT1
取指 4
清除
取指 SUB_1 执行 SUB_1

剩余113页未读,继续阅读
2017-11-27 上传
2020-10-07 上传
2023-10-30 上传
2023-06-07 上传
2023-07-28 上传
2023-06-07 上传
2023-06-07 上传
2023-07-28 上传
2023-06-09 上传

san兄弟
- 粉丝: 31
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
