Autoware快速入门指南:ROS自动驾驶研究
版权申诉
"Autoware_QuickStart_v1.1.pptx 是一个关于自动驾驶软件Autoware的快速上手教程,基于2016年8月1日的Autoware手册。本教程介绍了Autoware在ROS环境中的应用、功能以及可用的用户界面,帮助用户快速理解和操作Autoware进行自动驾驶研究与开发。"
Autoware是一个基于ROS(Robot Operating System)的开源软件,由名古屋大学开发,主要目标是服务于自动驾驶的研究和开发。它在GitHub上开放源代码,使得全球的研究者和开发者都能参与其中。Autoware的重要特性之一是利用ROS中的`.bag`文件(即rosbag)记录和时间戳所有的主题消息。这些记录可以用于回放消息,配合RViz(ROS的3D可视化工具)进行系统分析和调试。在机器人领域,同时分析多个传感器的数据往往颇具挑战,而rosbag和RViz的组合则提供了高效的工作方式,允许开发者在没有实际传感器的情况下反复调试系统。
Autoware提供了以下核心功能:
1. 定位(Localization):实现车辆的精准定位,通常结合全球定位系统(GPS)、惯性测量单元(IMU)和其他传感器数据进行。
2. 目标检测(Object Detection):通过摄像头、雷达等传感器数据,识别和追踪周围环境中的物体,如车辆、行人等。
3. 驾驶控制(Driving Control):根据定位和目标检测结果,制定并执行安全的行驶策略,包括路径规划和路径跟随。
4. 3D地图生成与分享(3D Map Generation and Sharing):创建高精度的三维环境地图,并能够共享给其他车辆或系统,支持自主导航。
Autoware提供了多种用户界面,方便不同需求的用户进行交互:
1. 运行时管理器(Runtime Manager):这是一个图形化应用程序,用于控制Autoware的运行,用户可以通过它启动、停止和监控各个模块。
2. RViz:这是ROS的3D可视化工具,能直观展示Autoware的各种功能,包括定位结果、目标检测、路径规划和路径跟随等,为开发者提供实时的系统状态反馈。
通过这个快速上手指南,用户可以了解到如何安装和配置Autoware,如何使用ROSbag和RViz进行数据分析,以及如何通过运行时管理器来控制Autoware的各项功能。此外,对于想要深入研究Autoware及其在自动驾驶领域的应用的开发者,这份教程将提供宝贵的起点。
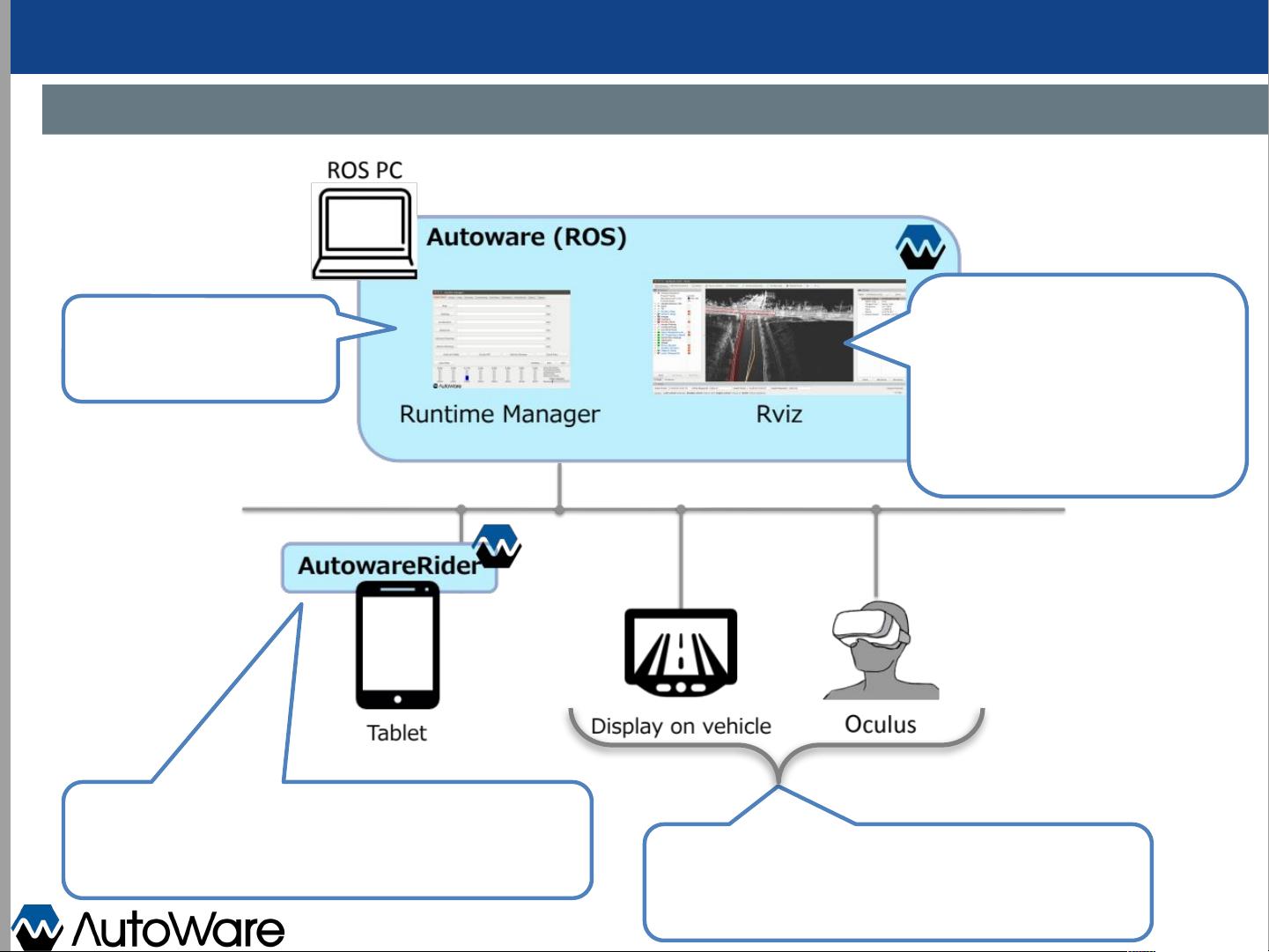
Available user Interfaces
4
2. USER INTERFACE
Runtime Manager
A GUI application for
controlling Autoware.
RViz
Visualizes in 3D the
various functions of
Autoware such as
localization, object-
detection, path-planning,
path-following, in an
integrated manner.
AutowareRider
A tablet application for setting and generating
a route plan, turning autonomous driving
mode on.
Other UIs
It is possible to visualize the 3D map being
used on the in-vehicle displays and device
such as Oculus.
剩余15页未读,继续阅读
2021-09-22 上传
2021-04-03 上传
2017-10-30 上传
2021-07-24 上传
2023-05-16 上传
2023-09-18 上传
2023-05-27 上传

shuimanting520
- 粉丝: 357
- 资源: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
