提升检测精度:边框回归详解及其应用
需积分: 0 94 浏览量
更新于2024-08-05
收藏 709KB PDF 举报
边框回归(Bounding Box Regression)是目标检测任务中的一项关键技术,尤其在基于区域提议(Region Proposal)的方法如RCNN、Fast R-CNN、Faster R-CNN、YOLO和SSD等中起着关键作用。它旨在通过微调预先提出的区域(通常由Selective Search或类似算法生成)的边界框,使其更加精确地与目标物体的边界框匹配。
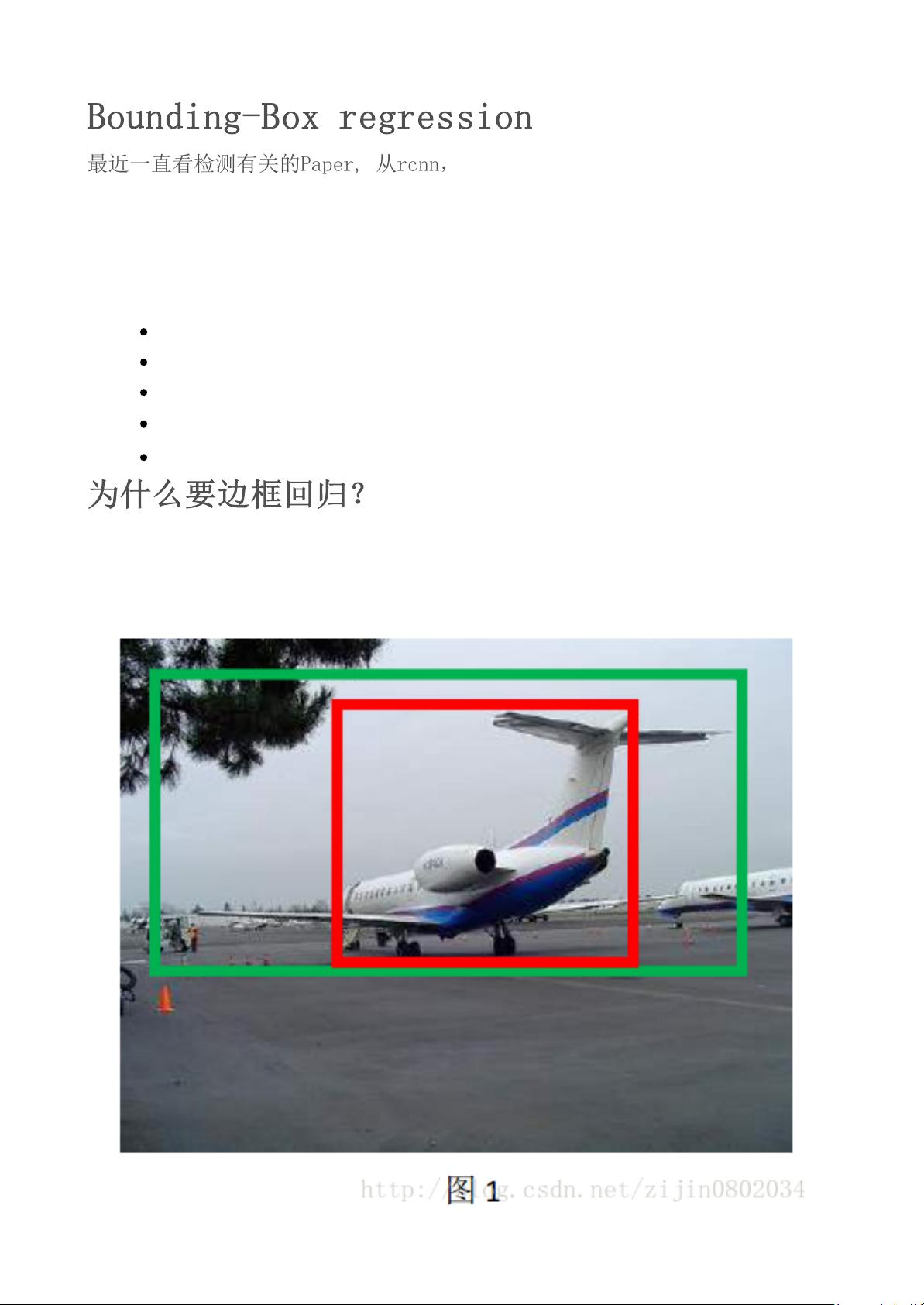
为什么要边框回归?目标检测的目标不仅仅是分类,还要求准确的位置预测。例如,即使图像中存在一个被分类器识别为飞机的候选区域,如果其位置不准确(IoU<0.5),就不能认为真正检测到了飞机。边框回归通过调整候选区域的坐标和尺寸,使得它们更接近于实际的地面真相(GroundTruth)边界框,从而提高检测精度。
边框回归的形式通常是基于窗口的四维向量(x, y, w, h),其中(x, y)代表中心点坐标,w和h表示宽度和高度。它的目的是寻找一个映射函数f,将输入的原始边界框P转换为一个更接近真实目标G的边界框G^,即:
f(Px, Py, Pw, Ph) = (Gx^, Gy^, Gw^, Gh^)
这个过程可以分解为两个步骤:
1. 平移:通过计算偏移量Δx和Δy,使新边界框G^相对于原边界框P进行平移,公式为:
G^x = Pwdx(P) + Px
G^y = Phdy(P) + Py
这是RCNN论文中提到的方法,其中dx(P)和dy(P)是对x和y轴方向的偏移量,分别根据宽度和高度变化。
2. 尺度缩放:通过指数函数进行宽度和高度的缩放,Sw = exp(dw(P)) 和 Sh = exp(dh(P)),使得新边界框的大小更接近真实值。dw(P)和dh(P)是对应的缩放系数。
边框回归的设计考虑了窗口表示的灵活性和准确性,它允许在初始区域提议的基础上进行微调,尤其是在IoU接近但未达到完全匹配时。这种方法的优点是可以利用分类器提供的置信度信息,通过优化损失函数(如Smooth L1 Loss)来调整边界框,提升整体检测性能。
总结来说,边框回归是目标检测中不可或缺的一部分,通过精细的几何变换,它优化了候选区域的边界框,提高了检测系统的精确性和鲁棒性。然而,值得注意的是,边框回归通常在离GroundTruth足够近的地方才有显著效果,因为它依赖于分类器的初步选择和区域提议的质量。
Bounding-Box regression
最近一直看检测有关的Paper, 从rcnn, fast rcnn, faster rcnn, yolo, r-
fcn, ssd,到今年cvpr最新的yolo9000。这些paper中损失函数都包含了边框回
归,除了rcnn详细介绍了,其他的paper都是一笔带过,或者直接引用rcnn就把
损失函数写出来了。前三条网上解释比较多,后面的两条我看了很多paper,才
得出这些结论。
为什么要边框回归?
什么是边框回归?
边框回归怎么做的?
边框回归为什么宽高,坐标会设计这种形式?
为什么边框回归只能微调,在离GroundTruth近的时候才能生效?
为什么
要
边
框
回
归
?
这里引用王斌师兄的理解,如下图所示:
下载后可阅读完整内容,剩余6页未读,立即下载
265 浏览量
2020-04-17 上传
2023-07-12 上传
2023-06-10 上传
2023-07-10 上传
2023-06-09 上传
2023-04-06 上传
2023-06-12 上传
2023-05-24 上传
2023-06-02 上传

思想假
- 粉丝: 33
- 资源: 326
 我的内容管理
展开
我的内容管理
展开







最新资源
- 十种常见电感线圈电感量计算公式详解
- 军用车辆:CAN总线的集成与优势
- CAN总线在汽车智能换档系统中的作用与实现
- CAN总线数据超载问题及解决策略
- 汽车车身系统CAN总线设计与应用
- SAP企业需求深度剖析:财务会计与供应链的关键流程与改进策略
- CAN总线在发动机电控系统中的通信设计实践
- Spring与iBATIS整合:快速开发与比较分析
- CAN总线驱动的整车管理系统硬件设计详解
- CAN总线通讯智能节点设计与实现
- DSP实现电动汽车CAN总线通讯技术
- CAN协议网关设计:自动位速率检测与互连
- Xcode免证书调试iPad程序开发指南
- 分布式数据库查询优化算法探讨
- Win7安装VC++6.0完全指南:解决兼容性与Office冲突
- MFC实现学生信息管理系统:登录与数据库操作
