庆至信实业2000吨自动化线:详细解读机器人编程关键点
版权申诉
7 浏览量
更新于2024-07-02
1
收藏 7.99MB PDF 举报
庆至信实业的2000吨自动化线采用ABB机器人进行操作,其程序设计精细且具有明确的功能定位。当更换新模具或需要调整程序时,理解每个程序点的含义至关重要。以下是一些关键点的详细解释:
1. **程序点意义**:
- **R1**: 这个点代表"pBforePic顺",是抓料前的定位点,机器人会在此处寻找并准备抓取板料。它可以手动调整,但通常是机器人自主确定位置。
- **pPic顺**: 是实际抓取板料的点,机器人在此处完成抓取动作,真空吸盘检测到材料后,将当前位置记录。
- **pAfterPic顺**: 抓取后的点,用于指示机器人抓取动作的终点。
- **pWaitLoad**: 等待加载点,机器人在此暂停,直到板料被完全吸取。
- **pBeforeLoad**: 板料被吸取前的准备点,位于料点附近。
- **pLoad**: 板料加载点,完成抓取并固定物料。
2. **R2-R6** 系列的点:
- **pWaitPic顺**: 类似于pWaitLoad,等待加载点。
- **pBeforePic顺**: 抓取前的辅助点,与R1类似。
- **pAfterPic顺10**: 抓取后的过渡点,可能表示特定的路径或动作。
- **pO径tLoad** 和 **pO径tLoad10**: 板料装载完毕到达压机外部的两个阶段点。
- **pWaitLoad** 在R6中未提及,可能是重复或替代了前面的某个点。
- **pBeforeDrop** 和 **pDrop**: 材料释放前后的位置点,用于处理卸载操作。
- **pAfterDrop** 和 **pO径tLoad(R6没有此项)**:释放后和到达压机外部的动作点。
3. **编程指令**:
- `Ca须须By步ar"rPro"主wob项_n径m;`:调用子程序,根据预设的程序编号执行相应动作。
- `止earc具L\止top主DI21主pPic顺主Offs(pBeforePic顺主0主0主-1500)主待20主too须1;`:机器人定位到pBeforePic顺,等待20秒,确保精确抓取。
4. **机器人动作控制**:
- 机器人按照预设的速度(如300mm/s)和路径(z10)移动到指定点。
- 速度和转角控制用于确保机器人在抓取、放置和移动过程中的精度和安全性。
这些程序点不仅定义了机器人在自动化生产线上的具体操作步骤,也反映了编程逻辑和机械动作的协调。理解这些点的含义有助于有效地维护和优化生产流程。
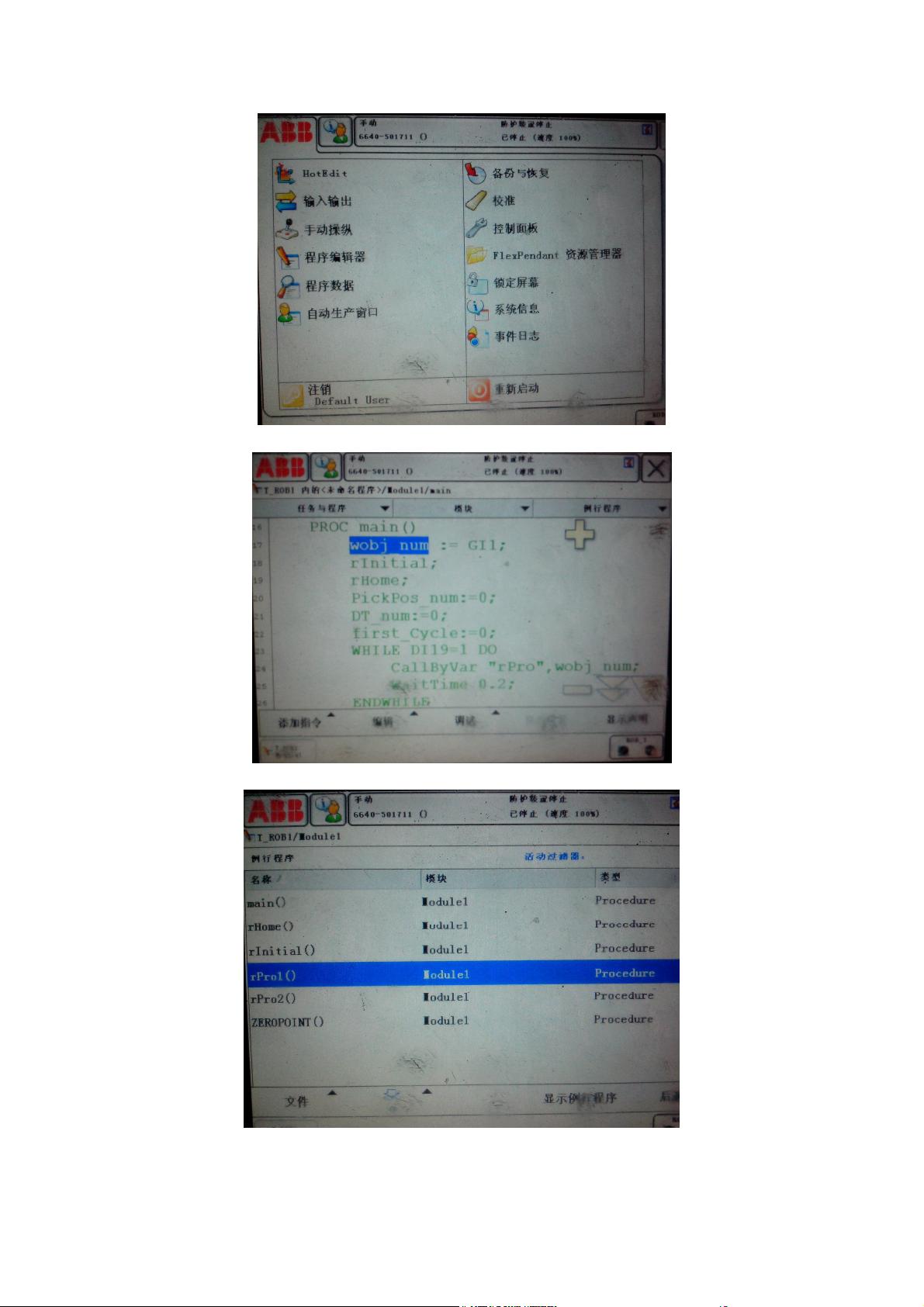
程序编辑器界面如图所示,点程序编辑器右角的例行程序
然进入到例行程序的界面,如图
选中一套模的的例行程序,如对应第一套模的例行程序 rPro1主然
点角的文件,角会弹图所示的窗口
剩余14页未读,继续阅读
2021-09-22 上传
2022-11-21 上传
2020-04-25 上传
2023-04-02 上传
2023-10-14 上传
2023-05-12 上传
2023-08-06 上传
2023-04-29 上传
2023-06-09 上传

是空空呀
- 粉丝: 186
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机人脸表情动画技术发展综述
- 关系数据库的关键字搜索技术综述:模型、架构与未来趋势
- 迭代自适应逆滤波在语音情感识别中的应用
- 概念知识树在旅游领域智能分析中的应用
- 构建is-a层次与OWL本体集成:理论与算法
- 基于语义元的相似度计算方法研究:改进与有效性验证
- 网格梯度多密度聚类算法:去噪与高效聚类
- 网格服务工作流动态调度算法PGSWA研究
- 突发事件连锁反应网络模型与应急预警分析
- BA网络上的病毒营销与网站推广仿真研究
- 离散HSMM故障预测模型:有效提升系统状态预测
- 煤矿安全评价:信息融合与可拓理论的应用
- 多维度Petri网工作流模型MD_WFN:统一建模与应用研究
- 面向过程追踪的知识安全描述方法
- 基于收益的软件过程资源调度优化策略
- 多核环境下基于数据流Java的Web服务器优化实现提升性能
