捷联惯导系统仿真:DCM算法详解与姿态计算
需积分: 48 173 浏览量
更新于2024-07-19
8
收藏 550KB PPT 举报
本资源主要介绍的是捷联式惯性导航系统(Strap-down Inertial Navigation System, SINS)的仿真程序,以及相关的理论和算法。讲座分为两部分:一是捷联惯导系统的基础概念,包括系统的特点、姿态变换和示意框图;二是核心算法的探讨,重点是方向余弦矩阵(Direction Cosine Matrix, DCM)的推导和角增量算法。
首先,捷联惯导系统以其独特的结构而著称,陀螺仪和加速度计直接绑定在载体上,无需物理平台。通过陀螺仪测量角速度,然后积分得到姿态角,同时加速度计的输出需转换到导航坐标系以补偿地球重力和其他非线性因素。加速度计的输出经过补偿后积分,可以获取载体的速度和位置信息。
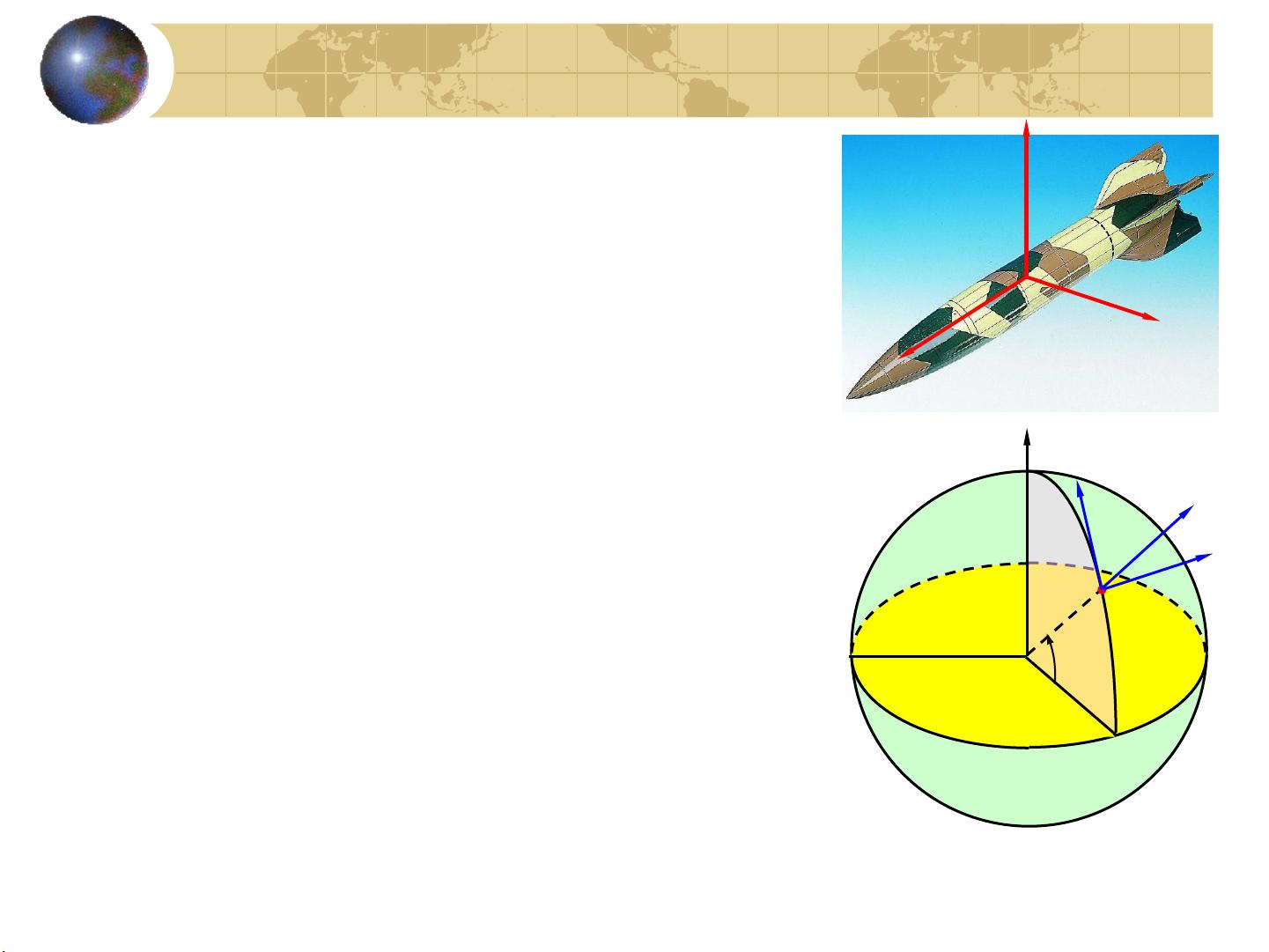
姿态变换是关键环节,其中加速度需要通过方向余弦矩阵来转换,这个矩阵反映了两个坐标系之间的关系。通过定义方向余弦矩阵(C),可以将载体坐标系中的加速度分解为导航坐标系中的各个分量,从而进行姿态更新。
讲座的第二部分深入探讨了方向余弦矩阵的求解方法,即角增量算法。这个算法基于初始的方向余弦矩阵(C),通过连续的角速度增量来更新矩阵,反映了载体在各个轴上的旋转。这种迭代过程是SINS算法的核心,它确保了导航数据的准确性和实时更新。
整个讲座提供了一个从基础到实践的路径,帮助理解捷联惯导系统的运作机制,特别是如何利用数学模型和算法实现姿态和位置的精确估计。这对于从事导航工程、航空航天或机器人技术等领域的人来说,是一份宝贵的参考资料。通过学习这些内容,学生或工程师能够更好地设计和优化仿真程序,提高导航系统的精度和鲁棒性。
Lecture 10 -- Algorithms for SINS 4
z, 方位轴
x, 滚动
轴
y, 俯仰轴
1.2 姿态变换
加速度需要变换 :
e
R
N
E
bz
by
bx
N
E
f
f
f
C
f
f
f
C 包含姿态信息 .
CC
也可用欧拉角、四元数等表示姿态
剩余18页未读,继续阅读
点击了解资源详情
182 浏览量
点击了解资源详情
2021-10-01 上传
2021-10-03 上传
1865 浏览量
240 浏览量

dlkangcy
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 初学者入门必备!Visual C++开发的连连看小程序
- C#实现SqlServer分页存储过程示例分析
- 西门子工业网络通信例程解读与实践
- JavaScript实现表格变色与选中效果指南
- MVP与Retrofit2.0相结合的登录示例教程
- MFC实现透明泡泡效果与文件操作教程
- 探索Delphi ERP框架的核心功能与应用案例
- 爱尔兰COVID-19案例数据分析与可视化
- 提升效率的三维石头制作插件
- 人脸C++识别系统实现:源码与测试包
- MishMash Hackathon:Python编程马拉松盛事
- JavaScript Switch语句练习指南:简洁注释详解
- C语言实现的通讯录管理系统设计教程
- ASP.net实现用户登录注册功能模块详解
- 吉时利2000数据读取与分析教程
- 钻石画软件:从设计到生产的高效解决方案
