控制约束下网络控制系统H∞鲁棒控制设计与仿真
需积分: 9 58 浏览量
更新于2024-08-12
收藏 272KB PDF 举报
本文主要探讨了2009年7月发表在《控制工程》杂志上的一篇论文,标题为“具有控制约束的网络控制系统的鲁棒H∞控制”。作者屈百达、洪丽敏和任华来自江南大学通信与控制工程学院,他们针对网络控制系统(Networked Control Systems,NCS)特有的控制输入限制,提出了一个具有外部扰动的系统模型,并深入研究了其H∞性能。
在论文中,作者假设网络控制系统中的H∞控制器和执行器采用事件驱动模式,而传感器则采取时间驱动。他们强调了一个关键条件,即网络诱导的时延必须小于传感器的采样周期,这是保证系统稳定性和实时性的基础。他们将这类网络控制系统的广义被控对象建模为线性离散系统,利用Lyapunov函数和线性矩阵不等式(LMI)这一工具进行系统稳定性分析。
通过这种方法,他们得出了一个闭环系统渐近稳定的充分条件,并给出了设计H∞控制器的具体算法。这个控制器的设计目标是提高网络控制系统在面对外部扰动时的鲁棒性和性能。论文还讨论了系统H∞控制器存在的必要条件和实现方法,表明通过实施这种控制器,能够显著改善具有控制约束的网络控制系统的动态响应和抗干扰能力。
最后,作者通过Matlab仿真实验验证了所提出的控制器的有效性,证明了在实际应用中,这种鲁棒的H∞控制策略能够有效地应对网络控制系统中的复杂动态环境和约束条件。
本文的研究对于理解和优化具有控制约束的网络控制系统具有重要的理论价值和工程实践意义,尤其是在确保系统稳定性的同时,兼顾了网络通信效率和实时性能。通过解决这类问题,有助于提升网络控制系统的整体性能和可靠性。
2009
年
7
月
第
16
卷第
4
期
控制工程
Control
Engineering
of
China
Jul . 2
009
Vo
l.
16
,
No.4
文章编号:
1671-7848
(
2009
)
04
-0
438
-0
4
具有控制约束的网络控制系统的鲁棒
H
∞控制
屈百达,洪丽敏,任华
(江南大学通信与控制工程学院,江苏无锡
214122
)
摘
要:针对具有控制约束的网络控制系统(
N etworked Control Systems , N
CS
)的特点,建
立了具有外部扰动的网络控制系统模型,对其
H~
性能加以分析和研究,并验证所取得的理论
成采。假设具有控制约束的网络控制系统的
H
尘控制器与执行器均为事件驱动,传感器为时间
驱动,且网络诱导时延小于传感器的采样周期,然后将此类网络控制系统的广义被控对象建
模为一类线性离散系统,运用
Lyapunov
函数和线性矩阵不等式
(LM
I)
,导出闭环系统渐近稳
定且满足给定
H
∞性能指标的充分条件,并给出了控制器的具体求法。得到了系统的
Hæ
控制
器存在条件及具体方法,通过设计该控制器,使具有外部扰动的网络控制系统的性能有很大
的改善,通过
Matlab
仿真证明该控制器行之有效。
关
键
词:网络控制系统;控制约束;鲁棒
H
组控制;线性生巨阵不等式
中图分类号
TP
273
文献标识码
A
Robust H
∞
Control
of N etworked Control Systems with Control Constraints
QU
B
α
i-da
,
HONG Li-min,
REN
Hua
(College
of
Communication
and
Control
Engineering
,
Jiang
nan
University
,
Wuxi
214122 , China)
Abstract:
To
the characteristic of the networked control systems
(NCS)
with control input constraints , the model for
NCS
with finite
disturbance is established
, and the H
00
property of the model is analyzed. The controller and actuator of the
NCS
with control input con-
straints are event driven
, and the sensor node is time driven. The network induced delay is less than the sampling period. Then the
generalized plant is modeled as linear discrete system. Based on Lyapunov function and linear matrix inequality
(LMI)
, a sufficient
condition for
NCS
with the asymptotic stability and
H
∞
performance
is
derived , and the design approach of the controller is given. After
applying the
H
∞
controller
to the
NCS
, the performance of the closed-Ioop system is improved. The simulation results show the validity
of the proposed controlle
r.
Key
words:
networked control systems control constraints; robust H æ control; linear matrix inequality
1
引
通过通讯网络代替传统的点对点式的连接方式
构成的闭环控制系统,称为网络控制系统。在控制
系统设计时,通常认为控制输入没有约束。然而,
对实际工程系统来说,所有的执行机构都存在物理
约束。在实际
NCS
中,难于观测控制对象的全部
状态,多个传感器、执行器和控制器常常分布在不
同的物理位置,并且实际控制对象往往要求输入有
界,以便控制对象安全、可靠地运行。针对有界控
制输入的系统,有学者从
2
个方向进行了研究:一
是当执行机构出现饱和非线性引起控制输入有界
时,如何设计控制系统以防止闭环系统的控制特性
不至于下降过大,至少应保证系统的闭环稳定
性[
1
~二是研究有界控制输入下闭环系统的渐近稳
定性问题
[2JO
本文是基于第
2
个方向针对具有控制约束
NCS
,建立其数学模型,研究鲁棒
H
∞控制问题,
给出了状态反馈
H
∞控制律的设计方法。
2
系统分析与建模
[3]
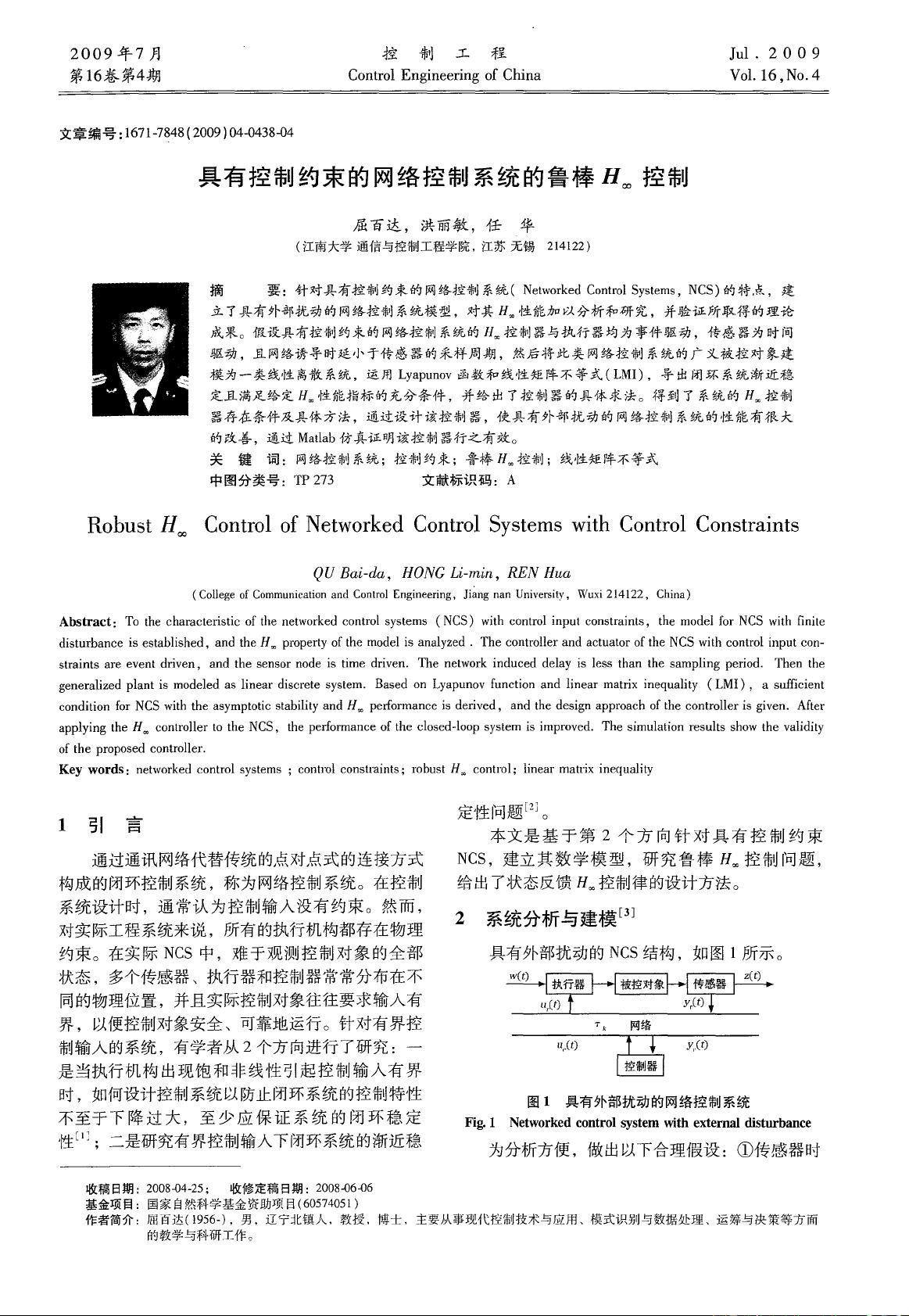
具有外部扰动的
NCS
结构,如图
l
所示。
)
t
(
F
I
t
1
孟
y
,(t)
图
1
具有外部扰动的网络控制系统
Fi
g.
1 Networked control system with
extern
且
1
disturbance
为分析方便,做出以下合理假设:①传感器时
收稿日期:
2008
-D
4-25;
收修定稿日期
2008
-D
6
-D
6
基金项目:国家自然科学基金资助项目
(60574051
)
作者简介:屈百达
(1956-)
,男,辽宁北镇人,教授,博士,主要从事现代控制技术与应用、模式识别与数据处理、运筹与决策等方而
的教学与科研工作。
下载后可阅读完整内容,剩余3页未读,立即下载
2021-06-16 上传
2021-05-11 上传
2021-05-22 上传
2021-05-26 上传
2021-06-16 上传
2021-05-21 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38710557
- 粉丝: 2
- 资源: 937
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
