KUKA TouchSense:精准焊接应用的附加技术
需积分: 10 105 浏览量
更新于2024-07-21
收藏 1.73MB PDF 举报
"KUKA TouchSense 是KUKA机器人公司为焊接等高精度应用提供的一种附加技术包,用于在工作件形状或位置存在偏差时进行路径校正。KUKA.TouchSense 具备接触寻位功能,能确保机器人作业的精确度。此技术适用于KUKA System Software 8.3,并在2014年2月20日发布了KST TouchSense 2.0 V2版本。文档版权归属于KUKA Roboter GmbH,且未经许可不得复制或透露给第三方。尽管文档内容经过检查,但可能与实际硬件和软件存在细微差异,且不保证完全一致。此外,文档指出,未在此描述的其他功能可能在控制器中可用,但在更换或服务工作中用户无权主张这些功能。技术可能随时变更,但不会影响功能。"
KUKA TouchSense 是KUKA机器人系统中的一个重要组件,它主要设计用于需要高度尺寸精度的任务,如焊接。在实际生产过程中,工件的形状或位置可能会有所偏差,这可能导致原本编程的机器人运动路径不再适用。KUKA TouchSense 的功能就是解决这个问题,它允许机器人在运行过程中感知和适应这些偏差,通过实时调整其路径来确保工作的准确性和一致性。
该技术的核心是接触寻位功能。当机器人工具与工件接触时,传感器会检测到这种接触,并将信息反馈给控制系统。然后,控制系统根据这些数据动态修正机器人的运动轨迹,以补偿工件的实际位置与预期位置之间的差距。这样,即使工件的位置有所变化,机器人也能按照预设的质量标准完成任务。
KUKA.TouchSense 2.0是该技术的一个更新版本,适应于KUKA System Software 8.3。这个版本可能包含了性能提升、用户体验改善或者新的功能集成。然而,文档中并未详细描述这些变化,可能需要查阅更详细的资料或者官方发布的更新日志来获取具体信息。
值得注意的是,虽然KUKA提供了一定的技术支持和文档,但用户不能期望所有未在文档中描述的功能都能在他们的系统中使用。此外,由于技术的不断发展,KUKA保留了在不改变基本功能的情况下进行技术更改的权利。
KUKA TouchSense 是一个强大的机器人自动化解决方案,旨在提高生产过程中的精度和适应性,尤其在面对工件几何形状不规则或位置不确定的情况时,它的价值更为突出。对于依赖高精度作业的工业环境,如汽车制造、精密装配和焊接等领域,KUKA TouchSense 是一种宝贵的工具,可以显著提高生产效率和产品质量。
9 / 53Issued: 20.02.2014 Version: KST TouchSense 2.0 V2
2 Product description
can thus be detected. The search path is dependent on the search distance X,
which is set in the Search Parameter option window.
The number of search instructions needed depends on the possible changes
in position of the workpiece. Up to 3 search instructions are generally neces-
sary (for the offset and rotation of each axis) in order to adapt a path to the
changed position. In the case of unfavorable geometries or poor accessibility,
the number of search motions can be extended as required.
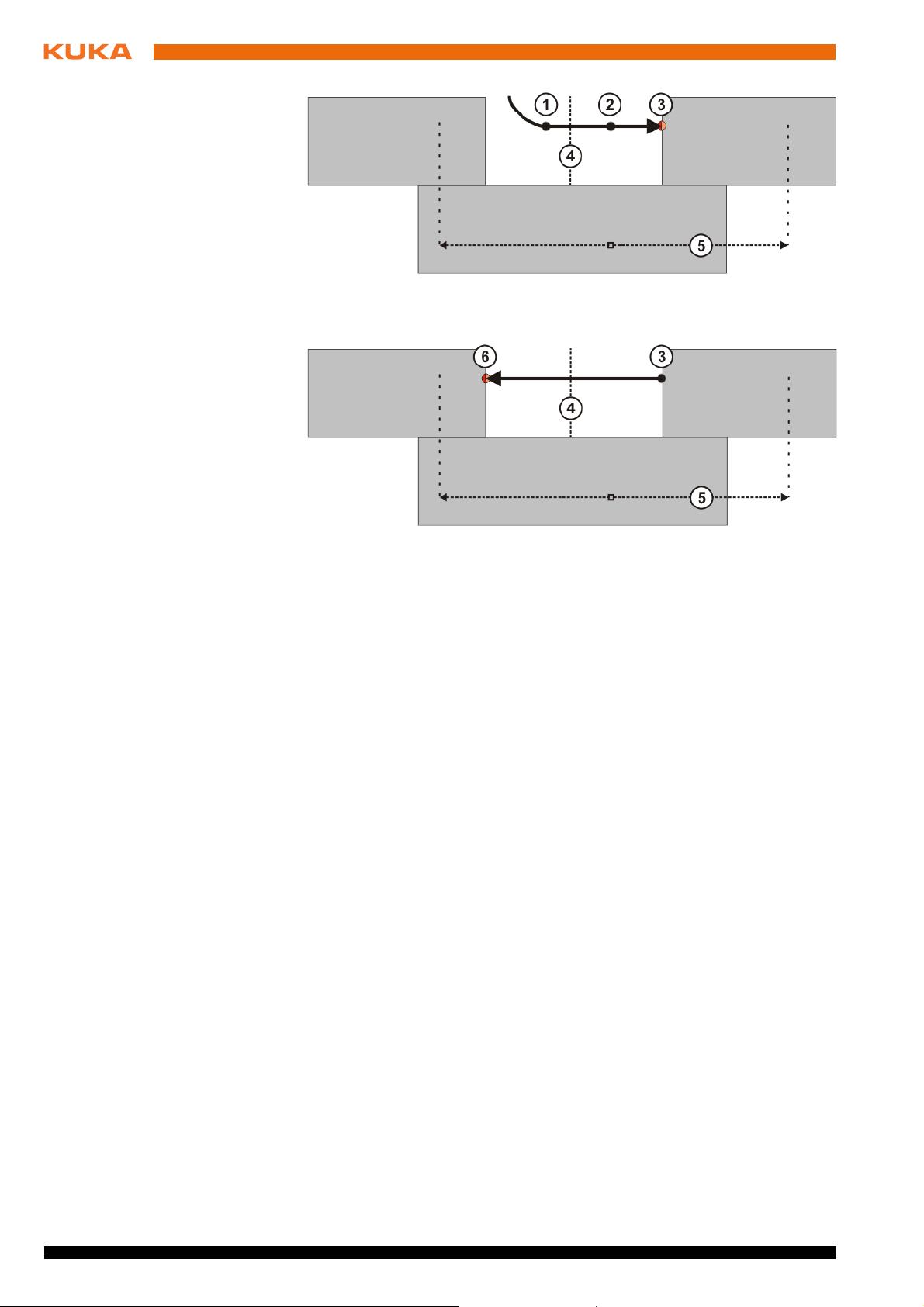
2.3.2 Double Touch mode
This method can be used to determine the center of a gap between 2 work-
pieces, e.g. for a square butt weld.
The start point of the search lies within the gap. The search direction is defined
by the Via point. The search motion is stopped when the sensor touches the
side of the gap. The search is then started automatically in the opposite direc-
tion. The search motion is stopped when the sensor touches the other side of
the gap.
From the axis values determined during the search, the center of the gap is
calculated and saved as a correction data set. The robot then returns to the
start point.
The start point and the search path must be programmed in such a way that
both the original and new positions of the gap lie within the limits of the search
motion and can thus be detected. The search path is dependent on the search
distance X, which is set in the Search Parameter option window.
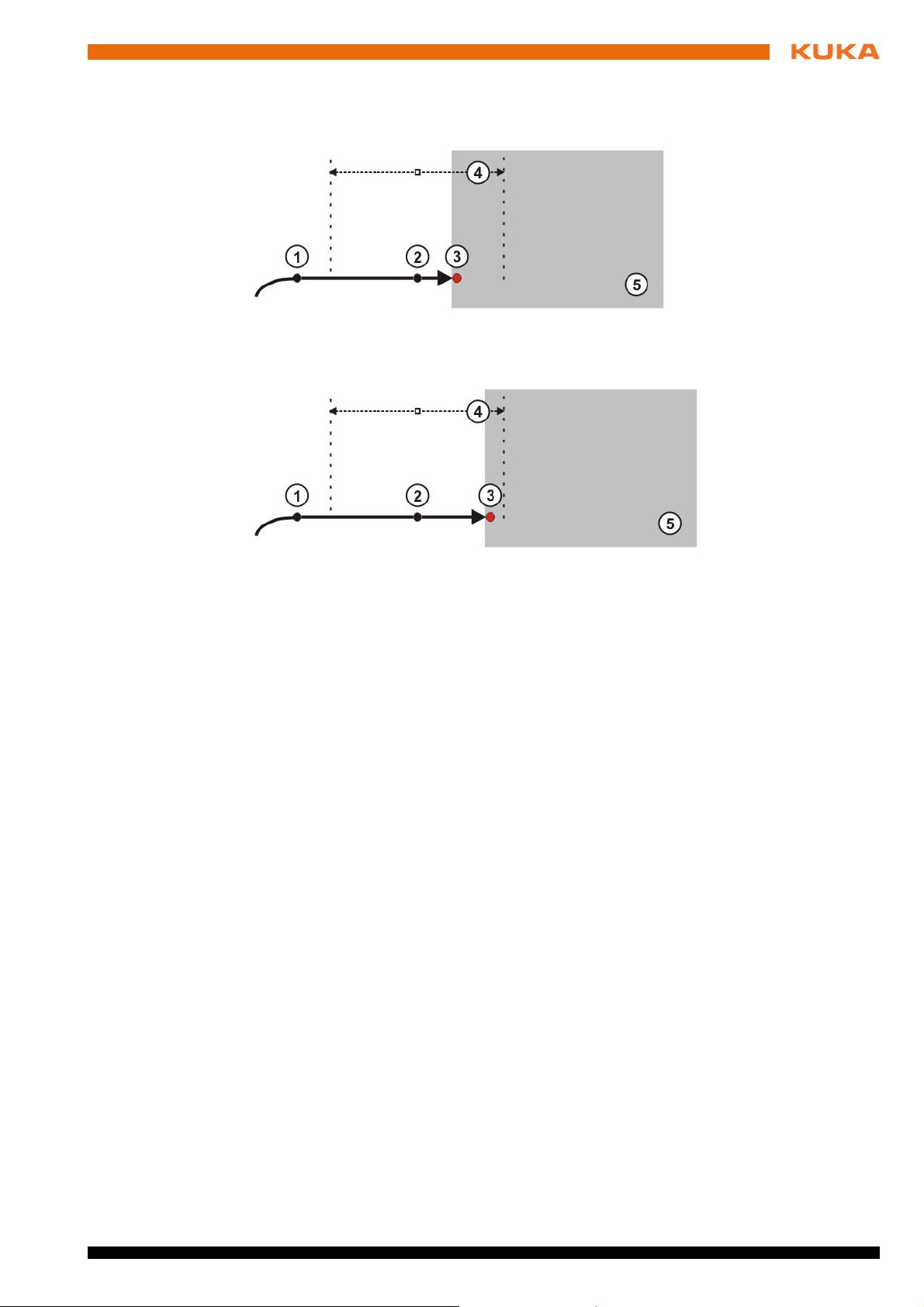
Fig. 2-3: Example: search motion, original position of the workpiece
Fig. 2-4: Example: search motion, new position of the workpiece
1 Start point of the search
2 Via point of the search: determines the search direction
3 Touch position: sensor touches workpiece
4 Search distance
5 Workpiece
剩余52页未读,继续阅读
点击了解资源详情
点击了解资源详情
2024-11-01 上传
2024-11-01 上传
2022-06-19 上传
2024-11-17 上传
2024-11-17 上传
2024-11-17 上传
2024-11-17 上传

Talkman28
- 粉丝: 2
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM Java项目:StudentInfo 数据管理与可视化分析
- pyedgar:Python库简化EDGAR数据交互与文档下载
- Node.js环境下wfdb文件解码与实时数据处理
- phpcms v2.2企业级网站管理系统发布
- 美团饿了么优惠券推广工具-uniapp源码
- 基于红外传感器的会议室实时占用率测量系统
- DenseNet-201预训练模型:图像分类的深度学习工具箱
- Java实现和弦移调工具:Transposer-java
- phpMyFAQ 2.5.1 Beta多国语言版:技术项目源码共享平台
- Python自动化源码实现便捷自动下单功能
- Android天气预报应用:查看多城市详细天气信息
- PHPTML类:简化HTML页面创建的PHP开源工具
- Biovec在蛋白质分析中的应用:预测、结构和可视化
- EfficientNet-b0深度学习工具箱模型在MATLAB中的应用
- 2024年河北省技能大赛数字化设计开发样题解析
- 笔记本USB加湿器:便携式设计解决方案
