
第 2 章 实验平台介绍及机械手的设计
该设计的目的是为了设计一台物料搬运机器人,利用现有已经报废的焊接机
器人,本文的中结构设计主要偏向于对原有机构的改造和机械手的设计。
2.1 自由度及关节
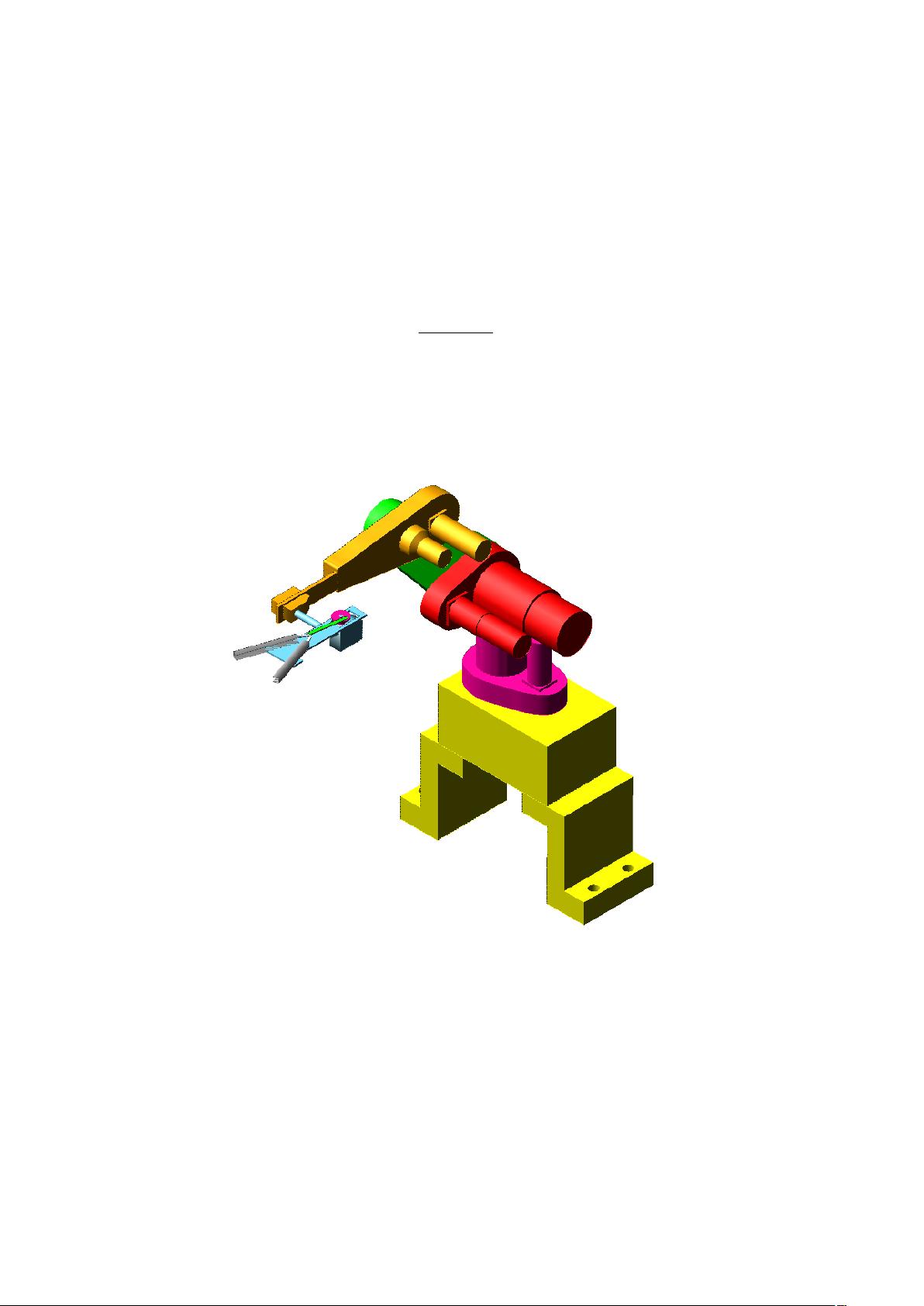
图 1
该机器人具有四个自由度 ,即腰关节、肩关节、肘关节和腕关节,都
为转动关节;还有一个用于夹持物料的机械手。
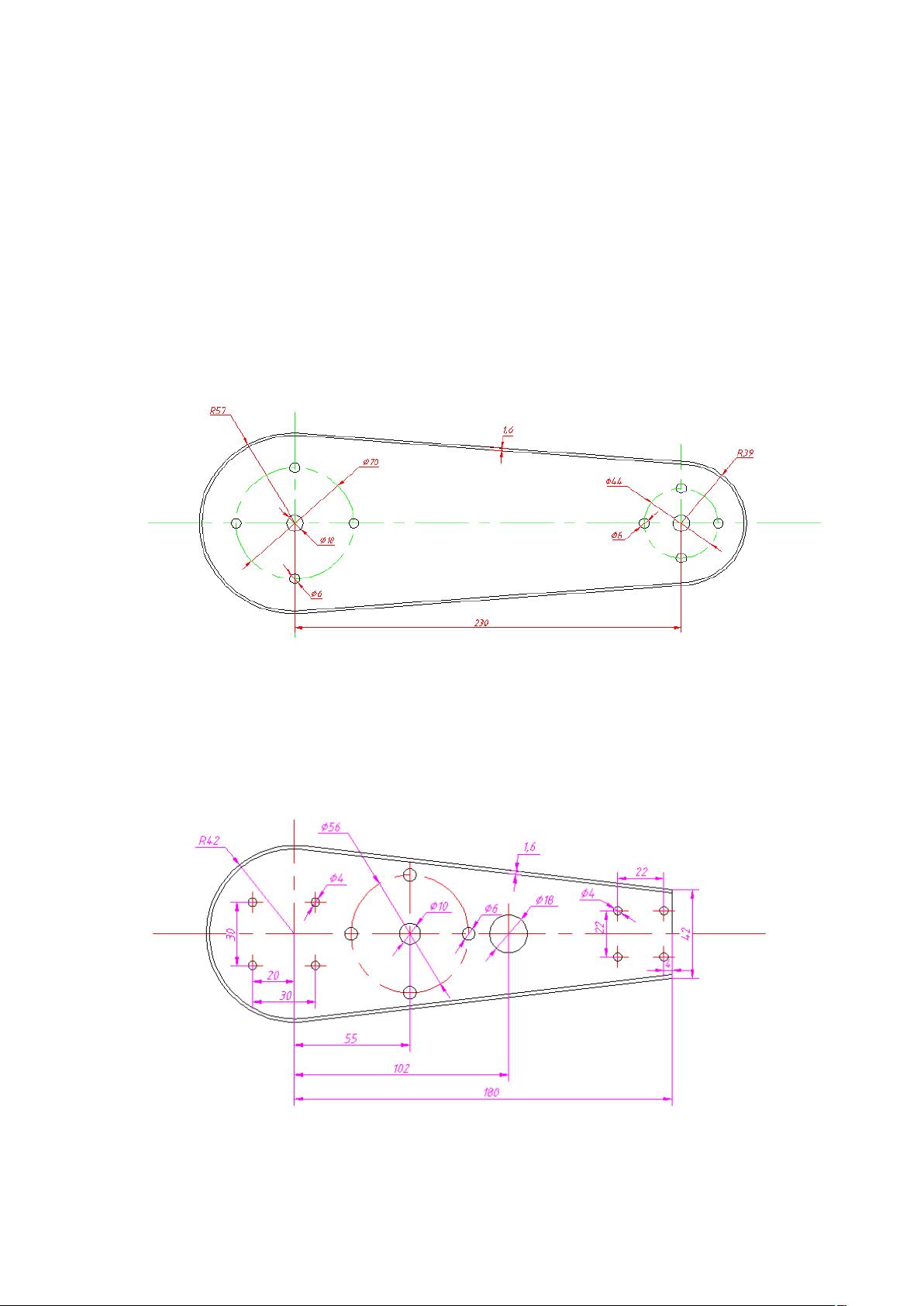
2.2 基座及连杆
2.2.1 基座
剩余48页未读,继续阅读

南抖北快东卫
- 粉丝: 73
- 资源: 5588

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助







