"智能车PID算法实现原理讲解"
在智能车辆控制系统中,PID(比例-积分-微分)算法是一种广泛应用的控制策略,它能够有效地调整车辆的速度和路径跟踪。在这个系统中,PID算法被用来确保智能车能够稳定、准确地沿着赛道上的黑线行驶。
首先,系统使用了一个定时中断来实现等间隔的数据采样和PID计算,这个中断每2毫秒执行一次,保证了控制的实时性。同时,设计了一个转速脉冲检测中断,用于实时监测车辆的转速。这样的设计有助于获取精确的车辆状态信息,以便进行有效的控制决策。
在PID速度控制中,系统采用了增量式数字PID算法。每10毫秒读取一次脉冲数,以此估算出当前车辆的实际速度vi_FeedBack。然后,将这个实际速度与通过模糊推理得到的期望速度vi_Ref进行比较,计算速度误差error1和速度误差率d_error,具体公式如下:
error1 = vi_Ref - vi_FeedBack; (公式3)
d_error = error1 - vi_PreError; (公式4)
其中,vi_PreError是上一时刻的速度误差。考虑到较长的控制周期可能导致响应速度过慢,系统引入了BANG-BANG控制策略。根据误差的正负和大小,当误差正大时,正转电机全功率;负大时,可能自由停车或反转;否则,按照PID计算的结果调整占空比。
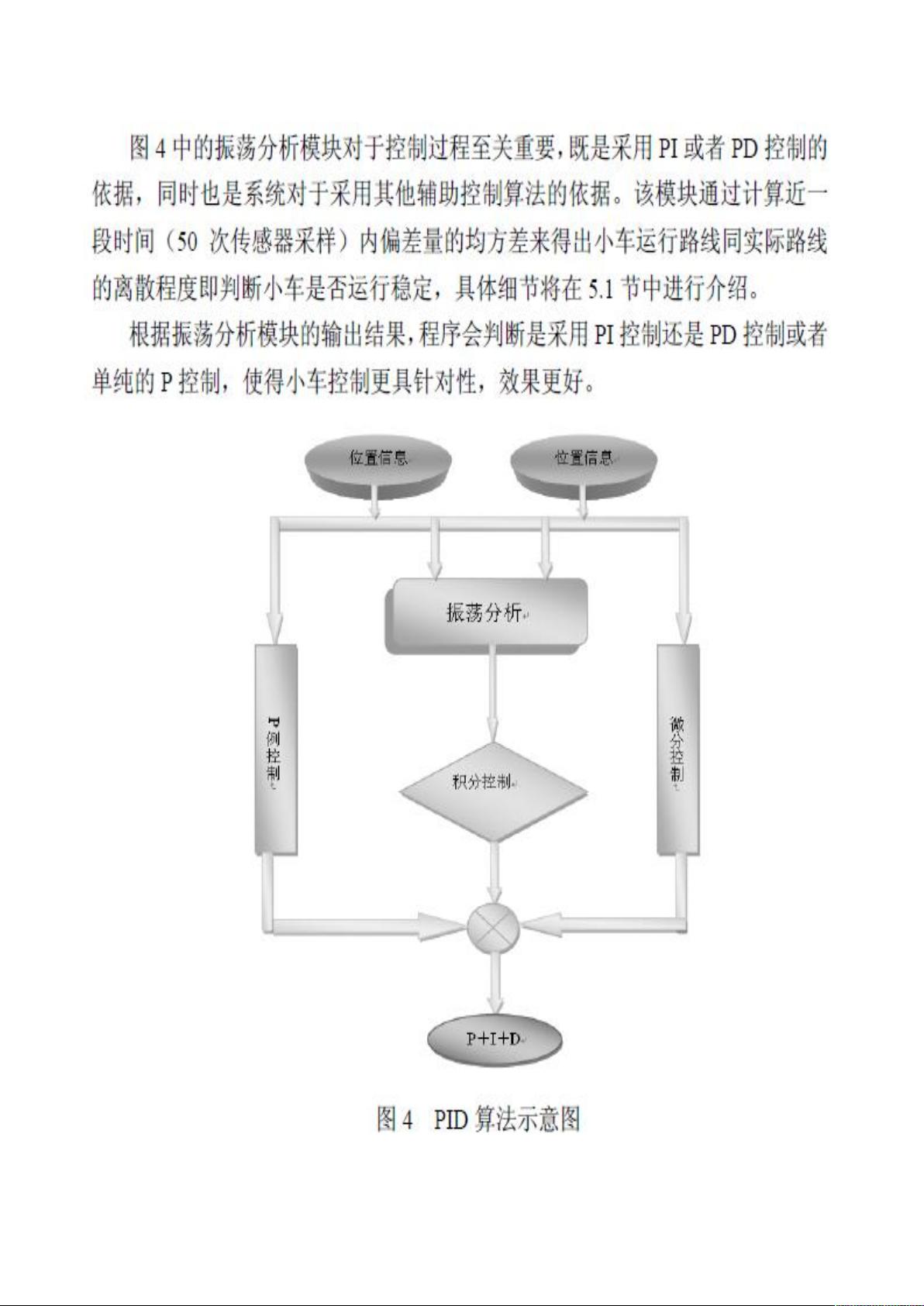
PID控制算法在智能车路径跟踪中的应用包括P(比例)、I(积分)和D(微分)三个部分。P参数反映水平偏差量的权重,直接影响车辆转向的角度,偏差越大,转向角度越大。D参数则反映了水平偏差速度的权重,它提供了对车辆动态调整的敏感度,使得车辆可以根据偏差变化的趋势提前做出反应,从而实现更平滑的转向。
水平偏差量是PID控制器的P部分,它直接指示了车辆偏离黑线的程度。而水平偏差速度作为PID控制器的D部分,揭示了车辆的运动倾向,帮助控制器更精确地预测和调整车辆的行驶方向。通过不断调整P和D参数,可以优化控制性能,使智能车在赛道上行驶得更加平稳和精准。
智能车PID算法的实现原理主要包括实时数据采样、转速监测、PID控制策略的运用以及P和D参数的解释和调整。通过这些机制,智能车能够有效地跟踪赛道,实现高速、稳定的行驶。


 我的内容管理
展开
我的内容管理
展开









