"ORB-SLAM2源码详解-补充H矩阵分解与变量命名规则解读"
需积分: 0 32 浏览量
更新于2023-12-13
收藏 838KB PDF 举报
ORB-SLAM2是一个开源的视觉SLAM系统,它可以从摄像头捕获的图像中实时地定位相机并构建地图。本文将对ORB-SLAM2的源代码进行详细解读,并补充讨论了H矩阵分解的相关内容。
在代码的结构方面,ORB-SLAM2主要包含了四个模块:Tracking、LocalMapping、LoopClosing和Viewer。其中,Tracking模块用于实时跟踪相机的运动,构建并更新地图;LocalMapping模块用于局部地图的构建和关键帧的插入;LoopClosing模块主要用于回环检测和闭环优化;Viewer模块则提供了一个简单的图形界面,用于显示地图和相机轨迹。
在代码中,变量的命名规则是按照一定的规则进行的。其中,以“p”开头的变量表示指针类型,以“n”开头的变量表示整型,以“s”开头的变量表示集合类型,以“v”开头的变量表示向量类型,以“l”开头的变量表示列表类型,以“m”开头的变量表示类的成员变量。这样的命名规则有助于提高代码的可读性和可维护性。
在ORB-SLAM2的代码解读过程中,我们通过分析系统的入口函数来了解系统的整体流程。系统的入口函数主要包括GrabImageStero、GrabImageRGBD和GrabImageMonocular三个函数,分别用于处理双目图像、RGB-D图像和单目图像的输入。在这些函数中,图像首先转换为灰度图像,然后通过构造Frame对象来表示当前帧。在双目和RGB-D情况下,除了灰度图像外,还需要提供右图或深度图。Frame对象的构造函数中,调用了ORB特征提取器对象(mpORBextractorLeft和mpORBextractorRight)来提取图像的特征点和描述子。
在ORB-SLAM2的代码中,还涉及到了H矩阵的分解。H矩阵是指基础矩阵F与相机内参矩阵K之间的关系矩阵。在ORB-SLAM2中,H矩阵的分解是通过调用opencv库中的函数来实现的。这一部分的代码是补充内容,用于进一步完善ORB-SLAM2系统的功能。
总之,ORB-SLAM2是一个功能强大的视觉SLAM系统,它的源代码经过详细解读后,我们对系统的整体结构和流程有了更深入的理解。通过对H矩阵的分解的补充,我们可以进一步提高系统的精度和鲁棒性。希望通过本次解读,能够对读者理解和学习ORB-SLAM2的源代码有所帮助。
7
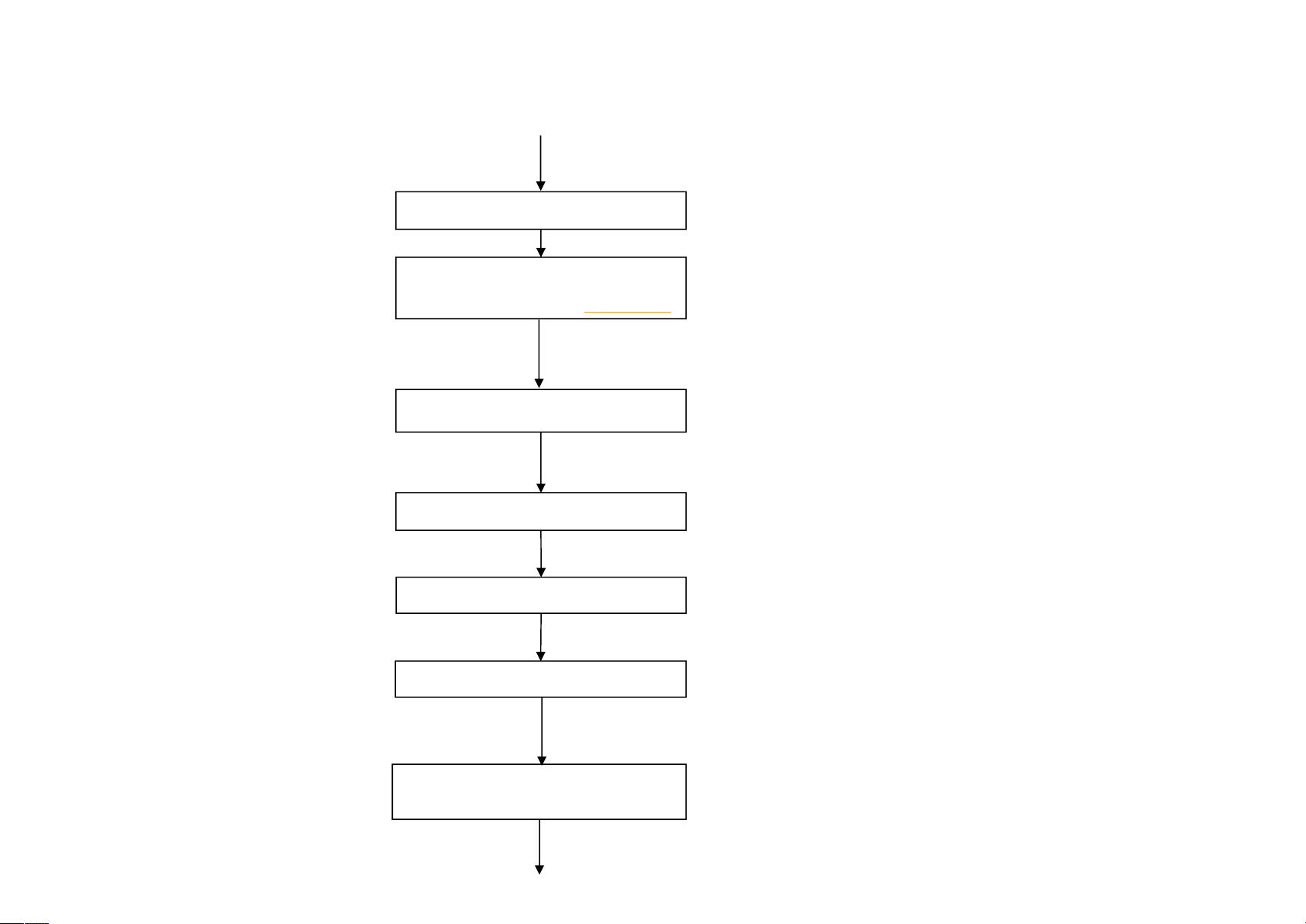
LocalClosing线程(Sim3计算):
SearchByBow
mpCurrentKF
处构造Sim3求解器,对匹配
成功的关键帧进行Sim3求解
for(pKF,mvpEnoughConsistentCandidates)
vvpMapPointMatches
SearchBySim3得到更多匹配
Scm -->(R,t,s)
mpCurrentKF,pKF
vpMapPointMatches
OptimizeSim3
(mpCurrentKF,pKF)
Scm -->gscm
vpMapPointMatches
将MatchedKF共视帧取出
vpMapPointMatches -->mvpCurrentMatchedPoints
pKF -->MatchedKF
将MatchedKF共视帧取出
(包括MatchedKF)
vpLoopConnectedKFs
SearchByProjection得到更
多匹配点
mpCurrentKF
mvpLoopMapPoints
gscm -->mg2oscw -->mscw
mvpCurrentMatchedPoints
7
剩余33页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2019-04-25 上传
2022-08-03 上传
2018-01-10 上传
2019-06-20 上传
2021-04-01 上传
2021-01-20 上传

maXZero
- 粉丝: 31
- 资源: 303
 我的内容管理
展开
我的内容管理
展开







最新资源
- axis复杂类型axis复杂类型
- JAVA\jQuery基础教程
- 矩阵连乘问题 给定n个矩阵{A1,A2,…,An},其中Ai与Ai+1是可乘的,i=1,2 ,…,n-1。如何确定计算矩阵连乘积的计算次序,使得依此次序计算矩阵连乘积需要的数乘次数最少。
- W5100数据手册(中文)
- Integer Factorization 对于给定的正整数n,编程计算n共有多少种不同的分解式。
- lpc213x中文资料
- MyEclipse下开发Web Service(Axis)
- javascript高级编程
- 邮局选址问题 给定n 个居民点的位置,编程计算n 个居民点到邮局的距离总和的最小值。
- json转对象数组与对象数组转json --Java
- Permutation with Repetition R={ r1,r2,… ,rn }是要进行排列的n 个元素。其中元素r1,r2,… ,rn可能相同。试设计一个算法,列出R的所有不同排列。
- Direct3D9初级教程
- 最新C语言标准ISOIEC9899-1999
- ANSYS经典实例汇集
- Search Number 科研调查时得到了n个自然数,每个数均不超过1500000000。已知不相同的数不超过10000个,现在需要在其中查找某个自然数,如找到则输出并统计这个自然数出现的次数,如没找到则输出NO。
- 工作流管理-模型,方法和系统(英文版)
