ORB-SLAM2源码详解:关键模块与流程
需积分: 0 168 浏览量
更新于2024-07-15
收藏 879KB PDF 举报
ORB-SLAM2是一款先进的视觉SLAM(同时定位与建图)系统,它在计算机视觉领域具有显著的地位。本文档深入解析了ORB-SLAM2的源代码,尤其关注于Tracking.cpp、LocalMapping.cpp、LoopClosing.cpp和Viewer.cpp这四个关键模块。作者吴博是人工智能与机器人研究所的研究人员,他分享了该系统的核心结构和工作流程。
首先,代码中遵循了清晰的变量命名规则,如使用 "p" 表示指针,"n" 表示整型,"b" 表示布尔型,"s" 和 "v" 分别代表集合(set)和向量(vector),"l" 表示列表(list),而 "m" 表示类成员变量。这有助于代码的可读性和维护性。
系统的主要入口点在于处理输入图像,包括从立体摄像头(Stereoscopic)、RGBD传感器或单眼相机获取图像。图像被转换成灰度图,并构造Frame对象,其中包含ORB特征提取器。对于单眼相机,有初始化(IniORBextractor)和已使用ORBextractor的两种情况。
接下来,是Tracking线程的核心功能。在Stereo模式下,先进行初始化(StereoscopicInitialization),然后进行相机位姿跟踪,通过创建KeyFrame并将其加入到地图(mpMap)和数据库(mpKeyFrameDB)中。用户可以通过设置 mbOnlyTracking 选项来选择仅跟踪定位模式,若设为true,则不会插入关键帧,只进行连续的跟踪。
LocalMapping.cpp负责局部地图的构建和更新,根据是否生成关键帧的逻辑,如果在MonocularInitialization时设置了 mbOnlyTracking 为true,那么将进入一个同时跟踪与定位的模式,此时局部地图的功能可能受限。
LoopClosing.cpp模块负责检测和处理循环闭合(loop closure),这是SLAM中的一个重要环节,用于提高地图的全局一致性。最后,Viewer.cpp负责渲染和显示SLAM过程中的结果,帮助用户理解和评估系统的性能。
ORB-SLAM2源码中文详解文档详细介绍了系统的工作原理,从输入图像处理到关键帧管理,再到局部地图构建和循环闭合,以及最终的可视化展示,涵盖了整个SLAM算法的执行流程和技术细节。这对于理解视觉SLAM技术,尤其是ORB-SLAM2算法的实现提供了宝贵的参考资源。
7
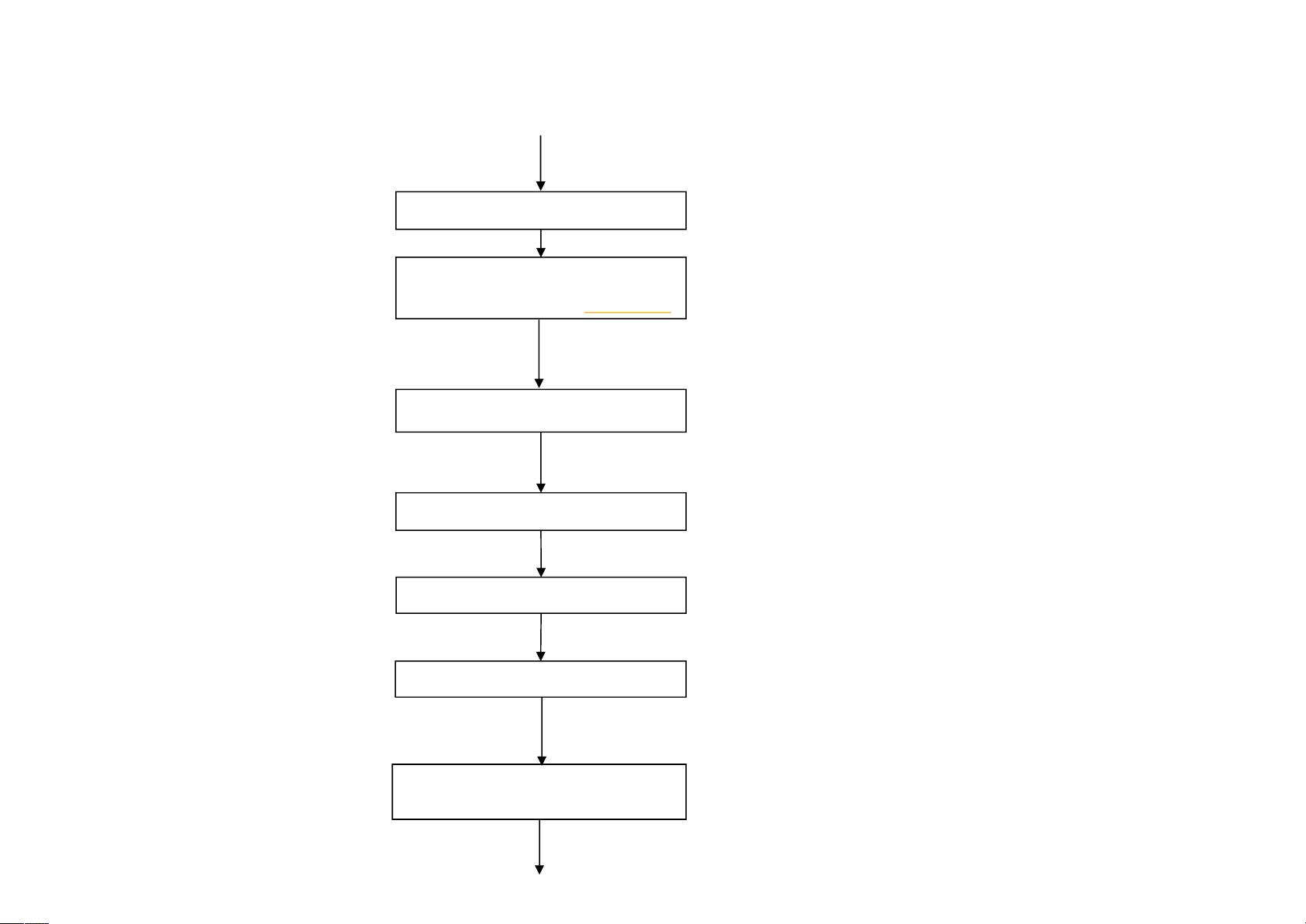
LocalClosing线程(Sim3计算):
SearchByBow
mpCurrentKF
处构造Sim3求解器,对匹配
成功的关键帧进行Sim3求解
for(pKF,mvpEnoughConsistentCandidates)
vvpMapPointMatches
SearchBySim3得到更多匹配
Scm -->(R,t,s)
mpCurrentKF,pKF
vpMapPointMatches
OptimizeSim3
(mpCurrentKF,pKF)
Scm -->gscm
vpMapPointMatches
将MatchedKF共视帧取出
vpMapPointMatches -->mvpCurrentMatchedPoints
pKF -->MatchedKF
将MatchedKF共视帧取出
(包括MatchedKF)
vpLoopConnectedKFs
SearchByProjection得到更
多匹配点
mpCurrentKF
mvpLoopMapPoints
gscm -->mg2oscw -->mscw
mvpCurrentMatchedPoints
7
剩余33页未读,继续阅读
2018-01-10 上传
2020-02-10 上传
2022-08-03 上传
2022-08-04 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

74ka
- 粉丝: 122
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Flex 3 Cookbook简体中文.pdf
- <程序员的SQL金典>
- 嵌入式linux开发手册
- SD卡接口规范的完整翻译
- Oracle10g_DBA..
- JCreator配置JSP环境方法
- MYSQL DBA 必读 understanding mysql internals
- 理解 ASP3.5.NET 基础结构.pdf
- 嵌入式系统原理,设计与应用
- AT89S51+单片机实验及实践教程
- ClearCase 客户端使用指南.pdf
- C++ GUI Programming with Qt 4, Second Edition
- 正则表达式常用正则表达式收集
- 家庭理财系统的可行性研究
- IT服务管理 基于ITIL的全球最佳实践
- jdbc api数据库编程实作教材
