
收稿日期
基金项目 挝辽宁省自然科学基金资助项目
作者简介 挝李树军 男 辽宁新民人 东北大学教授 博士
第卷第期
年 月
东 北 大 学 学 报 自 然 科 学 版
Journal of Northeastern UniversityNatural Science
Vol No
Dec
文章编号
双 并 联 机 器 人 协 作 的 运 动 学 建 模
李树军 朱天旭
东北大学 机械工程与自动化学院 辽宁 沈阳
摘 要 提出并联机器人以协作的方式提高其作业能力的一个新途径
通过引入瞬时作业点
的概念 将工件和刀具离散化 并用其相应坐标系上的一个向量来描述工件和刀具上的瞬时作业
点 建立了协作系统中各单机间的联系 将并联机器人协作运动学问题转化成二单并联机器人在
工件和刀具约束下的运动学参量的求解
建立了双并联机器人协作的等效闭链运动学模型和运动
学方程式 为并联机器人协作运动学分析和控制建立了基础
通过算例证明了模型的正确性和并
联机器人协作在拓展有效工作空间方面的有效性
关 键 词 并联机器人 协作 瞬时作业点 约束 等效闭链 运动学模型
中图分类号 T H 文献标识码 A
并联机器人机构具有刚度大 承载能力强 精
度高等特点 在机械制造业及航空航天业具有广泛
的应用前景 是近年来机器人学的热点研究课题之
一
但由于并联机器人机构是由多个分支连接
上下平台构成的空间机构 在运动过程中各分支的
构件容易产生相互干涉 作业空间受限
同时 并联
机器人机构在其作业空间内有各种各样的奇异点
使其作业能力进一步受到制约
因此 探索并联机
器人的最佳结构形式和进一步提高其作业能力的
途径是当前亟待解决的重要问题之一
将多节并联机构串接在一起组成超多自由度
的并串联系统是扩大其工作空间的途径之一
然而这种系统的运动学和控制问题更加复杂 而
且还会由于各节驱动装置重量的影响及误差的积
累 使其动力学特性和作业精度下降
本文提出并联机器人以协作的方式提高其作
业能力
如果采用 台或多台并联机器人协同
完成同一工作 即相当于组成一个并联超多自由
度系统 则可大大增大其作业空间 提高其作业能
力 可靠性及灵活性 而又不失原各单台并联机构
的特点
双并联机器人协作的运动学建模
11 双并联机器人协作系统坐标系的建立
9
并联机器人协作加工系统 是由两台并联机
器人按照一定的机构布局方案配置起来的
本文
将以一般 自由度 Stewart 并联机器人协作系统
为对象 建立双并联机器人协作运动学模型 为并
联机器人协作运动学分析和控制建立基础
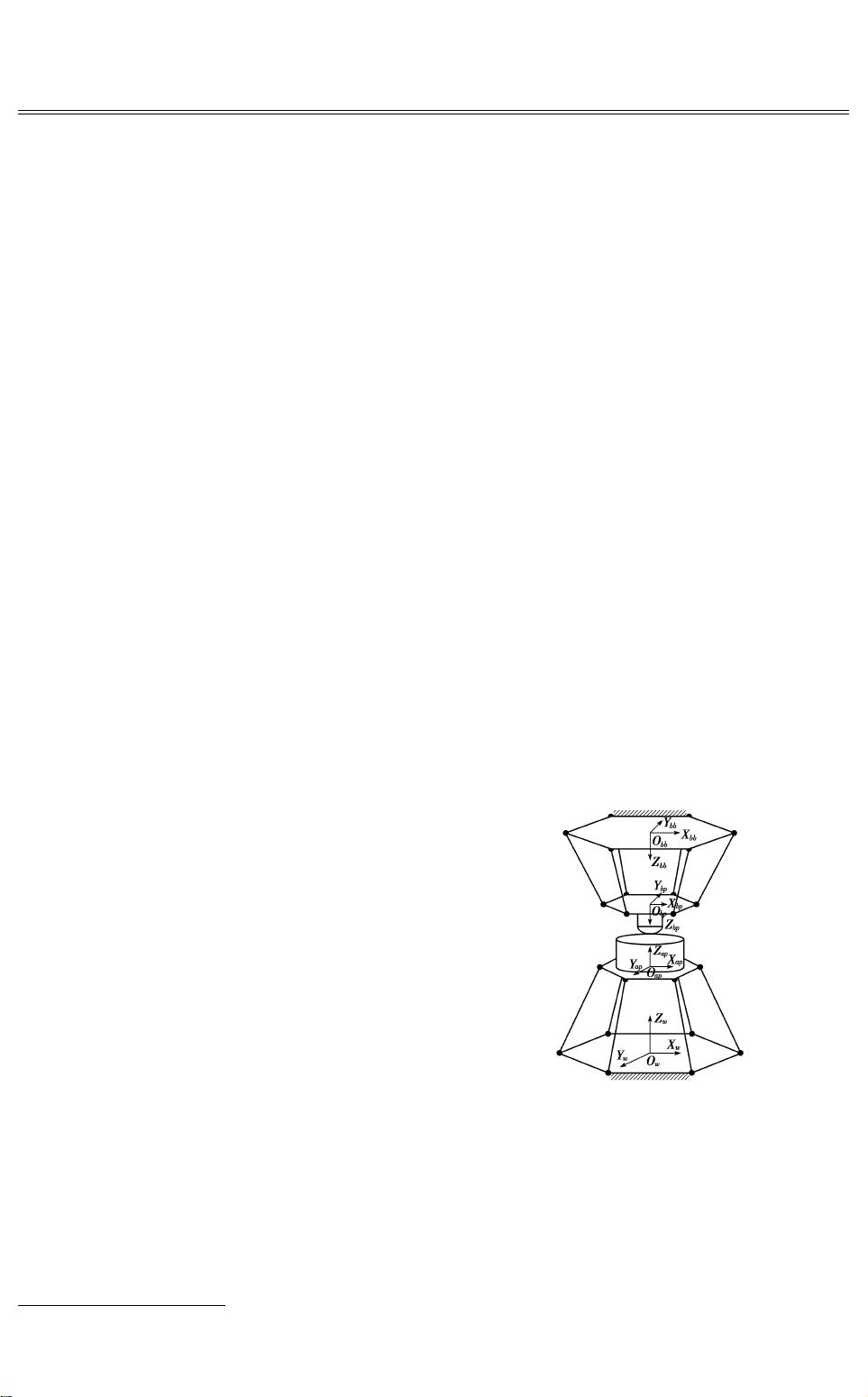
对于双并联机器人协作加工系统 设被加工
工件被装夹在并联机器人 A 的动平台上 刀具装
夹在并联机器人 B 的动平台上 结构简图及建立
的坐标系如图 所示
图 1 双并联机器人协作加工系统简图及其坐标系
Fig 1 换Schematic diagram of two parallel manipulators
in cooprating and coodinate system
基准坐标系 O
w
X
w
Y
w
Z
w
与并联机器人 A
静平台坐标系重合 各坐标轴的方向如图所示
并联机器人 A 动平台坐标系 O
a
p
X
a
p
Y
a
p
Z
a
p
坐标原点位于动平台几何中心点 X
a
p
Y
a
p
平
面与动平台平面重合 Z
a
p
轴垂直于动平台平面
下载后可阅读完整内容,剩余3页未读,立即下载

weixin_38713586
- 粉丝: 3
- 资源: 933
 我的内容管理
展开
我的内容管理
展开







最新资源
- Unity UGUI性能优化实战:UGUI_BatchDemo示例
- Java实现小游戏飞翔的小鸟教程分享
- Ant Design 4.16.8:企业级React组件库的最新更新
- Windows下MongoDB的安装教程与步骤
- 婚庆公司响应式网站模板源码下载
- 高端旅行推荐:官网模板及移动响应式网页设计
- Java基础教程:类与接口的实现与应用
- 高级版照片排版软件功能介绍与操作指南
- 精品黑色插画设计师作品展示网页模板
- 蓝色互联网科技企业Bootstrap网站模板下载
- MQTTFX 1.7.1版:Windows平台最强Mqtt客户端体验
- 黑色摄影主题响应式网站模板设计案例
- 扁平化风格商业旅游网站模板设计
- 绿色留学H5模板:科研教育机构官网解决方案
- Linux环境下EMQX安装全流程指导
- 可爱卡通儿童APP官网模板_复古绿色动画设计
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


