上海大学自强队家庭服务机器人技术分析
下载需积分: 46 | DOC格式 | 15.53MB |
更新于2024-07-24
| 131 浏览量 | 举报
"这篇文档是关于上海大学自强队研发的家庭服务机器人的技术报告,详细介绍了机器人的设计、任务分析、运动学原理以及硬件电路板等内容。"
家庭服务机器人是一种智能化设备,旨在帮助人们完成日常生活中的各种任务。上海大学自强队研发的这款机器人集成了多项先进技术,包括全向运动底盘、基于舵机的机器人手臂、kinect视觉系统和激光传感器,以实现高效的家庭服务功能。
1. 机器人任务分析:
- 特定人识别:机器人通过学习和记忆特定人物的特征,能在一段时间后再次识别出他们。
- 物体抓取与托运:利用机器人手臂和传感器,精准地抓取和搬运物品。
- 快速跟随:机器人能迅速跟踪并跟随指定的人移动。
- 自定位与导航:在有人引导后,机器人可自主导航至目标位置。
- 非限定项目:鼓励创新,展示机器人更多可能性。
2. 机器人运动学分析:
- 采用全向三轮结构,允许机器人在各个方向自由移动。运动学模型描述了速度和角速度之间的关系,公式表示了机器人坐标系和场地坐标系间转换的数学表达,这为控制机器人的精确移动提供了理论基础。
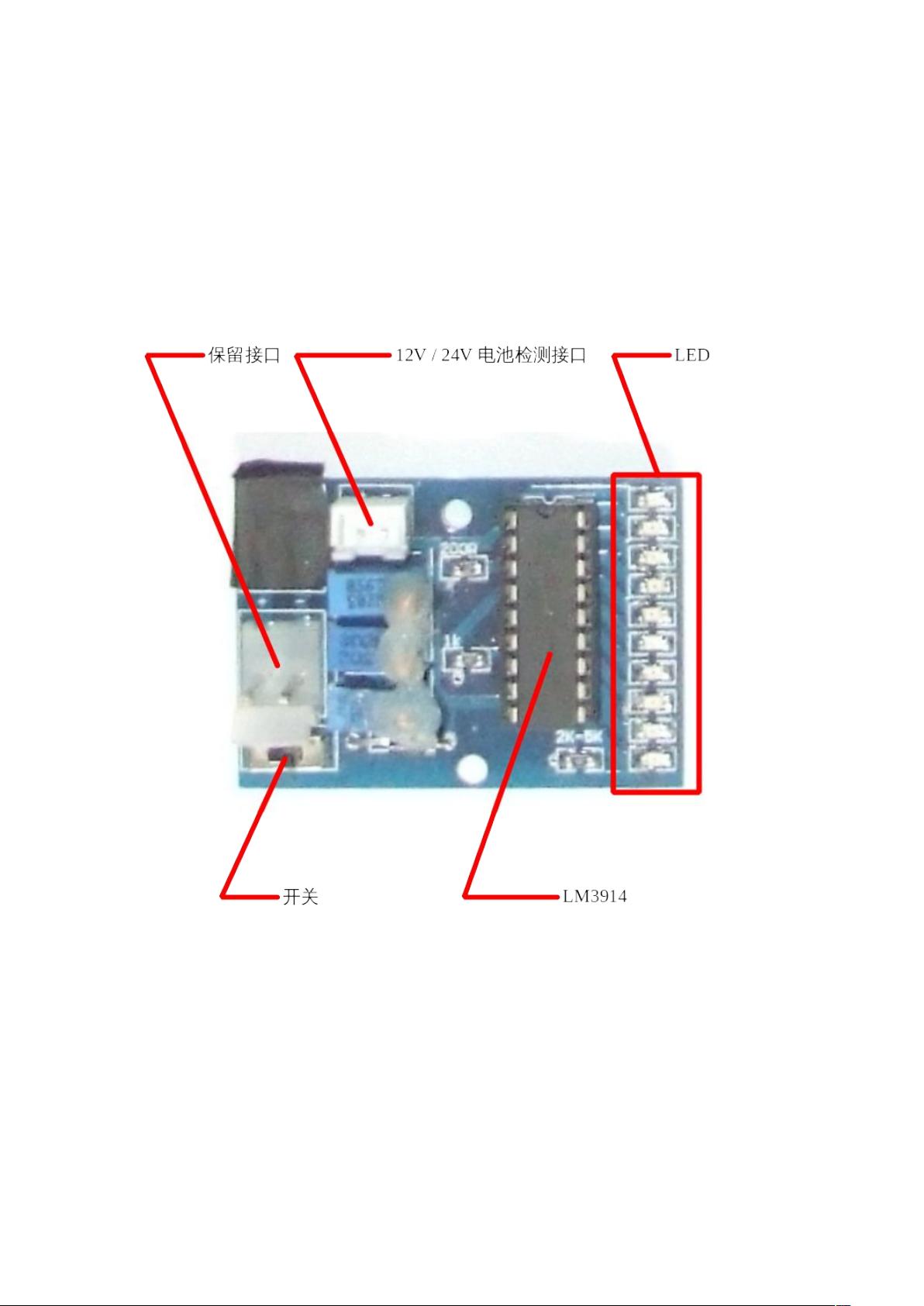
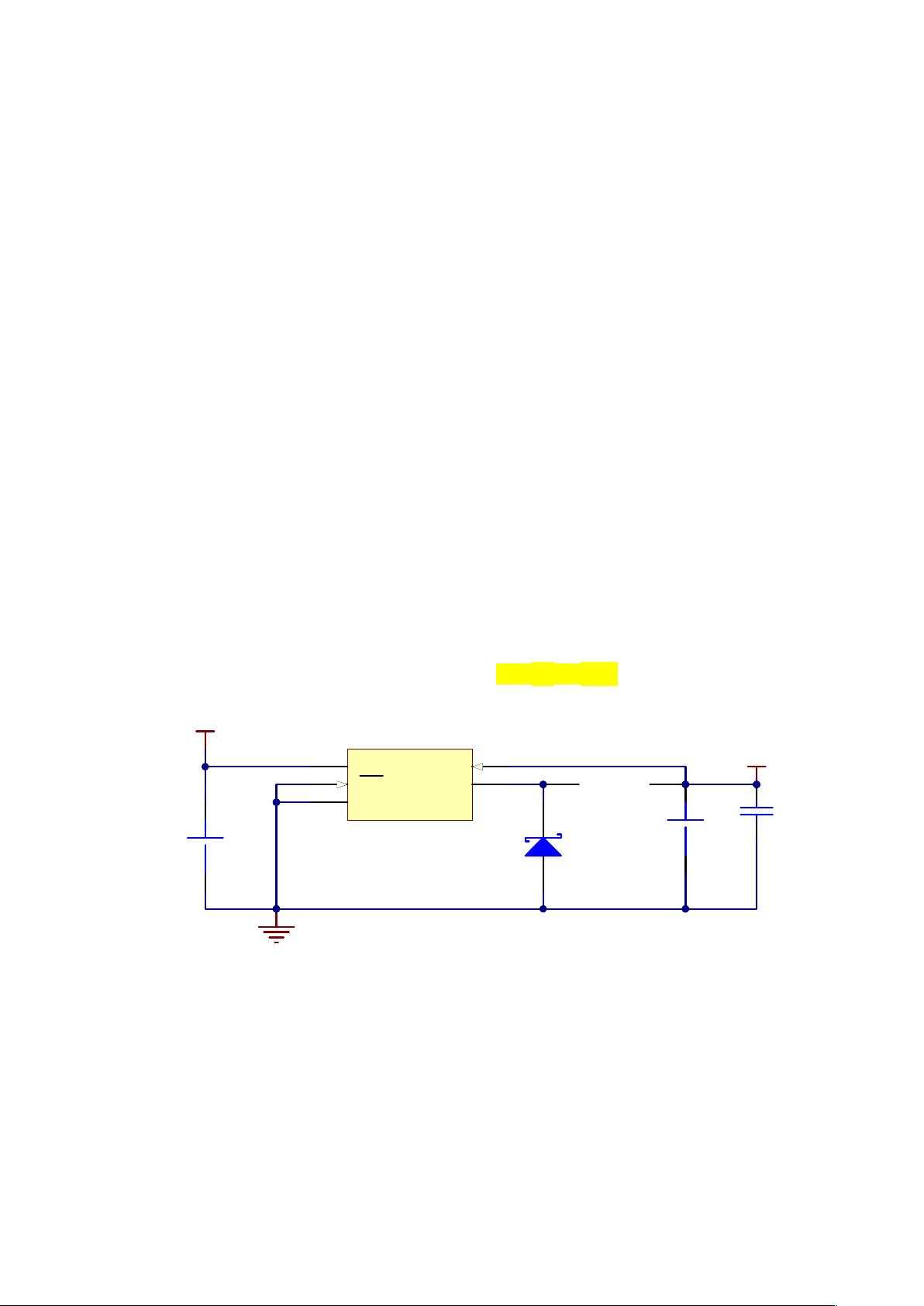
3. 硬件电路板:
- 上海大学自强队的机器人经历了多次硬件迭代,电路板设计包含了家庭服务机器人所需的关键组件,如微控制器、驱动电路、传感器接口等,确保机器人各项功能的稳定运行。
家庭服务机器人的研发涉及到机械工程、电子工程、计算机科学等多个领域。全向运动控制的实现依赖于复杂的运动学模型,而任务执行则需要高精度的传感器和智能算法支持。此外,硬件电路板的设计与优化对于提升机器人的性能和可靠性至关重要。通过这样的技术报告,我们可以深入理解家庭服务机器人背后的复杂技术和设计思路,为未来相关领域的研究和开发提供参考。

相关推荐




shhu1993
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Windows到Linux入门教程:基础知识与安装指南
- 伟大架构师的抽象层次策略:简化IT解决方案
- JasperReport与iReport中文配置与使用详解
- Oracle分析函数详解与应用示例
- 无线局域网详解:概念、标准与技术应用
- Quartz定时任务开发指南
- <项目名称>操作手册编写规范详解
- Cadence Allegro PCB设计中文手册
- uVision2入门:Keil C51 开发工具教程
- 搭建虚拟域名:解析与配置详解
- DWR中文教程:快速掌握远程方法调用
- 测试人员的思考艺术:超越数字迷思
- WEKA3.5.5用户指南:数据探索与分析
- DWR教程:入门与实践
- EJB3.0实战教程:从入门到精通
- TMS320C6416:600MHz DSP在3G基站高速处理中的关键角色
