MATLAB Robotics Toolbox v10.4官方指南
需积分: 48 125 浏览量
更新于2024-07-09
收藏 3.86MB PDF 举报
"MATLAB ROBOTICS TOOLBOX 是一个官方的MATLAB工具箱,适用于学习和研究机器人技术。它由Peter Corke开发,已有超过25年的持续发展历史,具有高度的成熟度。此版本对应于2017年6月出版的第二版书籍《Robotics, Vision & Control》。该工具箱提供了丰富的函数,用于机器人学的研究和模拟,包括机械臂类机器人和移动机器人的功能。对于机械臂,涵盖了从运动学、轨迹生成到动力学和控制的各个方面;对于移动机器人,涵盖了路径规划、动态规划、定位、地图构建以及同时定位和映射(SLAM)等功能。此外,工具箱还利用类来表示机器人、传感器和地图,并包含Simulink模型。"
MATLAB ROBOTICS TOOLBOX 是一个强大的软件包,专为在MATLAB环境中进行机器人技术的教育、研究和开发设计。这个工具箱的核心在于提供了一整套工具,帮助用户解决从基本的机器人学问题到复杂的机器人控制策略的各种挑战。
1. **机械臂机器人功能**:工具箱提供了计算机器人运动学的函数,如前向和逆向运动学,允许用户确定机器人关节角度与末端执行器位置之间的关系。此外,还有轨迹生成函数,能够设计平滑的机器人运动路径。动力学和控制功能则支持对机器人的运动和力进行建模和控制设计,包括动力学方程的求解和控制器的实现。
2. **移动机器人功能**:针对移动机器人,MATLAB ROBOTICS TOOLBOX 提供了路径规划算法,可以生成机器人在环境中的安全导航路径。同时,工具箱包含了处理机器人定位问题的函数,比如基于传感器数据的定位算法。地图构建和SLAM算法使得机器人能够在未知环境中自主探索并构建环境地图。
3. **类结构**:工具箱采用面向对象的编程方法,通过类来表示机器人、传感器和其他实体。这种设计使得代码更加模块化,易于理解和维护,同时也方便用户扩展和定制。
4. **Simulink模型**:除了MATLAB函数,工具箱还提供了Simulink模型,这是一个图形化的仿真工具,特别适合于实时系统和控制系统的模拟。用户可以通过Simulink对机器人控制系统进行可视化设计和仿真。
5. **社区支持**:工具箱附带的讨论组提供了用户交流平台,用户可以在这里提问、分享经验,得到作者和其他用户的支持和解答。
MATLAB ROBOTICS TOOLBOX 是一个全面的机器人学研究工具,无论你是初学者还是高级研究人员,都能从中找到所需的工具和资源来实现你的机器人项目。其丰富的功能和成熟的框架,使得机器人学的学习和应用变得更加高效和便捷。
1.1. CHANGES IN RTB 10 CHAPTER 1. INTRODUCTION
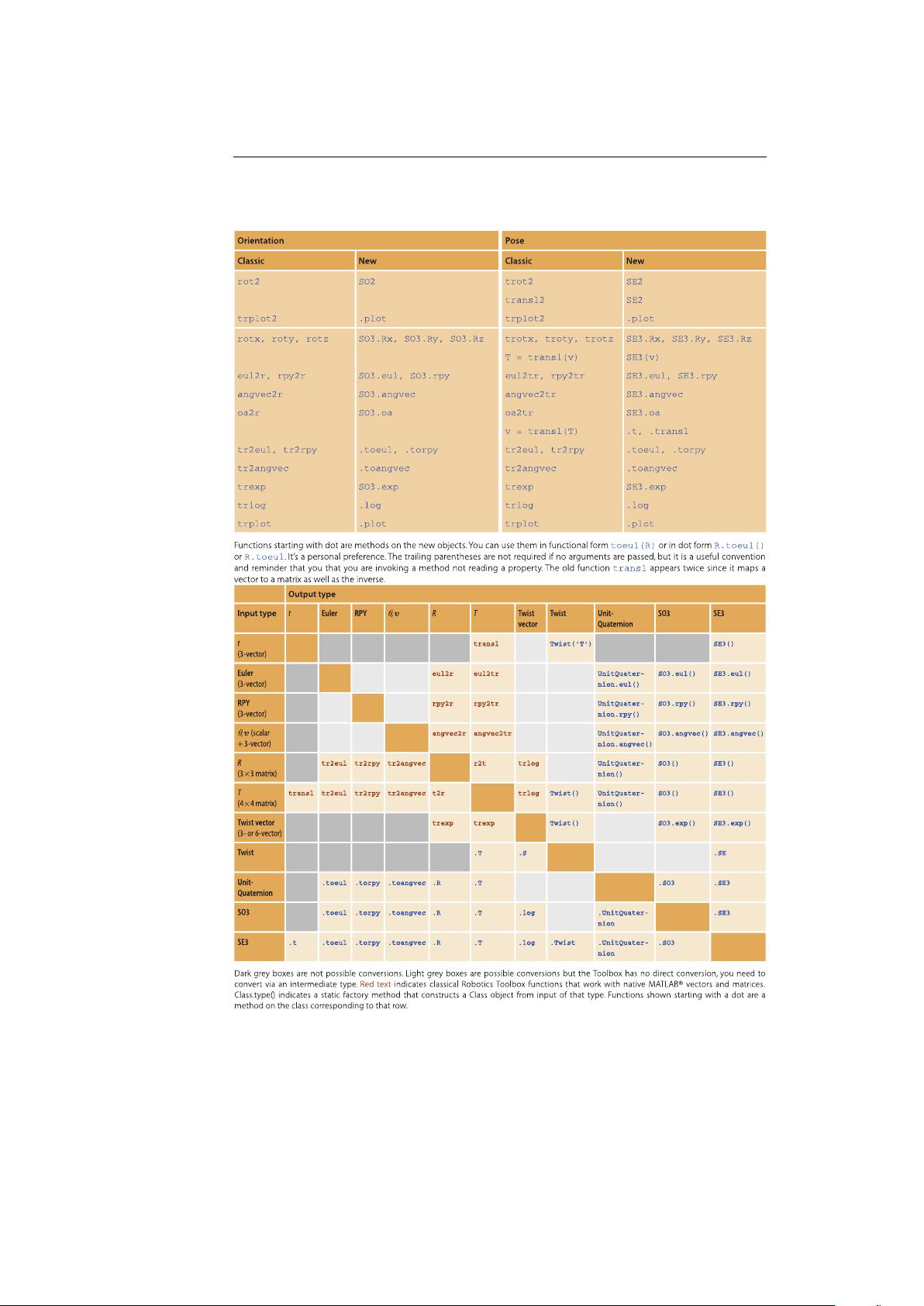
Figure 1.1: (top) new and classic methods for representing orientation and pose, (bot-
tom) functions and methods to convert between representations. Reproduced from
“Robotics, Vision & Control, second edition, 2017”
Robotics Toolbox 10.4 for MATLAB
®
16 Copyright ©Peter Corke 2020




剩余461页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2016-04-23 上传
2022-07-05 上传
147 浏览量
2023-12-21 上传
点击了解资源详情
点击了解资源详情

EstrangedZ
- 粉丝: 113
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全国江河水系图层shp文件包下载
- 点云二值化测试数据集的详细解读
- JDiskCat:跨平台开源磁盘目录工具
- 加密FS模块:实现动态文件加密的Node.js包
- 宠物小精灵记忆配对游戏:强化你的命名记忆
- React入门教程:创建React应用与脚本使用指南
- Linux和Unix文件标记解决方案:贝岭的matlab代码
- Unity射击游戏UI套件:支持C#与多种屏幕布局
- MapboxGL Draw自定义模式:高效切割多边形方法
- C语言课程设计:计算机程序编辑语言的应用与优势
- 吴恩达课程手写实现Python优化器和网络模型
- PFT_2019项目:ft_printf测试器的新版测试规范
- MySQL数据库备份Shell脚本使用指南
- Ohbug扩展实现屏幕录像功能
- Ember CLI 插件:ember-cli-i18n-lazy-lookup 实现高效国际化
- Wireshark网络调试工具:中文支持的网口发包与分析
