现代控制工程(第五版) - Katsuhiko Ogata
"现代控制工程,第五版,作者Katsuhiko Ogata,由Prentice Hall出版。本书涵盖了现代控制工程领域的核心概念和技术,适用于高等教育和专业工程实践。"
现代控制工程是自动化、电子工程和系统科学等领域的重要学科,它研究如何设计、分析和优化动态系统的性能。Katsuhiko Ogata的《现代控制工程》第五版是一部广泛使用的教材,旨在提供全面而深入的理论基础和实用方法。
该书内容可能包括以下几个关键知识点:
1. **控制系统的基本概念**:书中会介绍控制系统的定义、分类(如开环与闭环系统、连续时间与离散时间系统)以及系统建模的基础知识。
2. **线性代数与矩阵理论**:控制工程中的许多分析和设计工具都基于线性代数,如状态空间模型、特征值分析等。
3. **传递函数和频率响应**:这是分析控制系统动态特性的重要工具,可以帮助理解系统的稳定性和响应速度。
4. **控制系统的稳定性**:包括劳斯-赫尔维茨稳定性判据、根轨迹法和奈奎斯特稳定性判据,这些都是评估系统是否稳定的关键方法。
5. **控制器设计**:包括PID控制器、状态反馈控制、最优控制等,这些设计方法能够改善系统的性能指标,如响应速度、超调量、稳态误差等。
6. **现代控制理论**:可能涉及李雅普诺夫稳定性理论、状态观测器设计、卡尔曼滤波器等高级主题,这些都是现代控制工程的重要组成部分。
7. **MATLAB在控制工程中的应用**:MATLAB是控制工程师常用的工具,用于建模、仿真和控制器设计。书中可能会包含如何使用MATLAB进行控制系统的分析和设计。
8. **数字控制与采样系统**:随着数字技术的发展,数字控制变得越来越重要。这部分可能涉及Z变换、离散时间系统的稳定性分析和数字控制器设计。
9. **非线性控制系统**:虽然本书主要关注线性系统,但可能会对非线性系统的基本概念和分析方法进行简要介绍。
10. **实际系统案例**:为了帮助读者将理论应用于实践,书中通常会包含各种工程应用实例,如航空航天、机械、电力系统等。
通过深入学习《现代控制工程》,读者可以掌握控制工程的核心原理,并具备解决复杂控制系统问题的能力。这本书对于学生和专业工程师来说,是一本不可或缺的参考书。
Section 1–2 / Examples of Control Systems 5
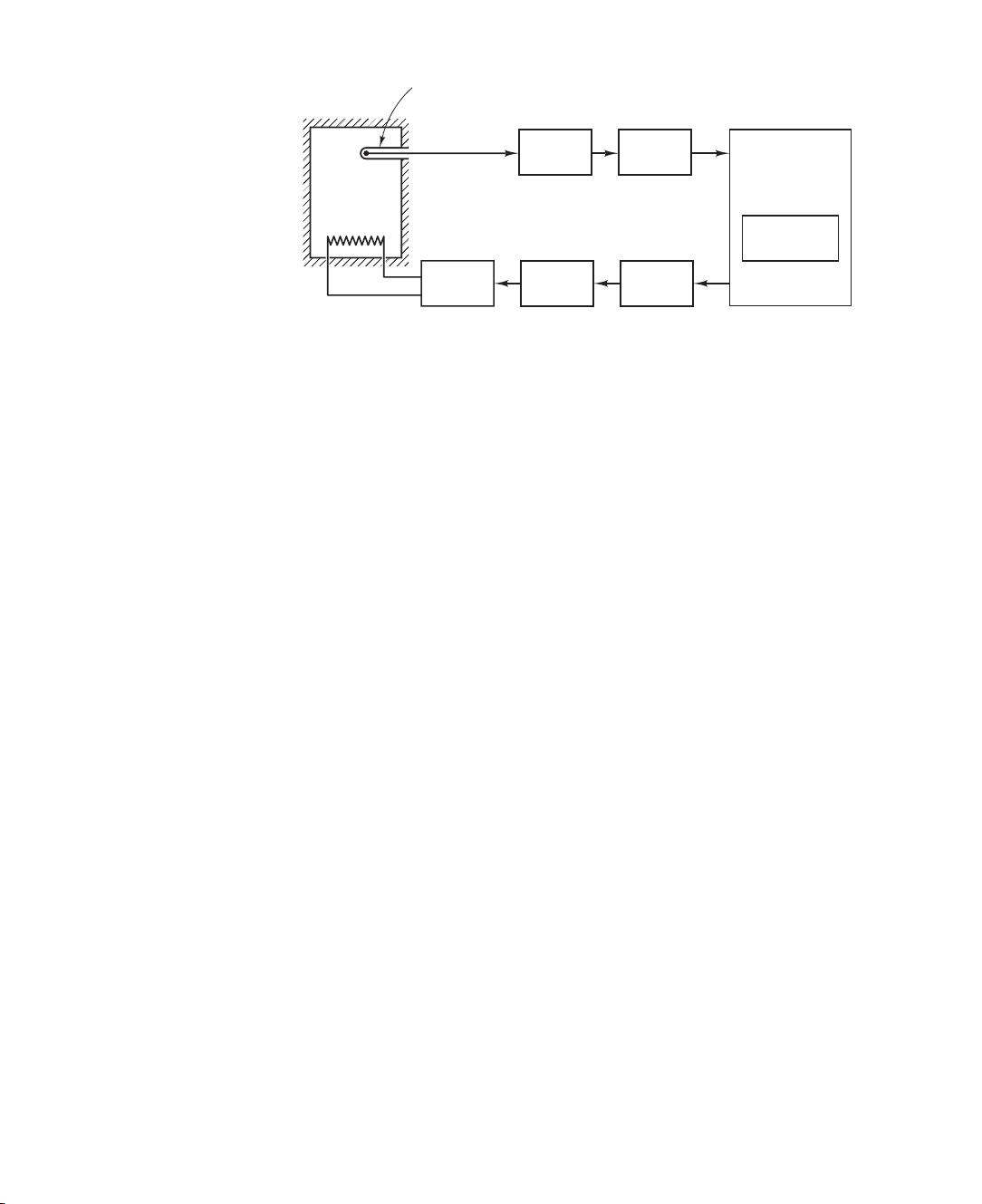
Thermometer
Heater
Interface
Controller
InterfaceAmplifier
A/D
converter
Programmed
input
Electric
furnace
Relay
Figure 1–2
Temperature control
system.
to a digital temperature by an A/D converter. The digital temperature is fed to a con-
troller through an interface. This digital temperature is compared with the programmed
input temperature, and if there is any discrepancy (error), the controller sends out a sig-
nal to the heater, through an interface, amplifier, and relay, to bring the furnace tem-
perature to a desired value.
Business Systems. A business system may consist of many groups. Each task
assigned to a group will represent a dynamic element of the system. Feedback methods
of reporting the accomplishments of each group must be established in such a system for
proper operation. The cross-coupling between functional groups must be made a mini-
mum in order to reduce undesirable delay times in the system. The smaller this cross-
coupling, the smoother the flow of work signals and materials will be.
A business system is a closed-loop system.A good design will reduce the manageri-
al control required. Note that disturbances in this system are the lack of personnel or ma-
terials, interruption of communication, human errors, and the like.
The establishment of a well-founded estimating system based on statistics is manda-
tory to proper management. It is a well-known fact that the performance of such a system
can be improved by the use of lead time, or anticipation.
To apply control theory to improve the performance of such a system, we must rep-
resent the dynamic characteristic of the component groups of the system by a relative-
ly simple set of equations.
Although it is certainly a difficult problem to derive mathematical representations
of the component groups, the application of optimization techniques to business sys-
tems significantly improves the performance of the business system.
Consider, as an example, an engineering organizational system that is composed of
major groups such as management, research and development, preliminary design, ex-
periments, product design and drafting, fabrication and assembling, and tesing. These
groups are interconnected to make up the whole operation.
Such a system may be analyzed by reducing it to the most elementary set of com-
ponents necessary that can provide the analytical detail required and by representing the
dynamic characteristics of each component by a set of simple equations. (The dynamic
performance of such a system may be determined from the relation between progres-
sive accomplishment and time.)



剩余904页未读,继续阅读
2019-04-13 上传
2023-07-05 上传
2023-12-16 上传
2023-12-09 上传
2023-06-23 上传
2024-05-24 上传
2023-06-30 上传
2024-11-05 上传
2024-11-05 上传

wang_xianzhi
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- RPSL:机器人感知规范语言(RPSL)
- 学生成绩管理系统(java实现).zip
- java11_64_bin.zip jdk11免费下载
- My-FreeCodeCamp-Code:我来自训练营的代码
- eulerian_video_magnification:实现欧拉视频放大并用于心率检测等
- pet-projects.dev-frontend:用于https:dev-pet-projects.github.io的Nuxt.js Buefy前端
- cpp代码-162.4.4.2
- matlab由频域变时域的代码-speaker-recognition:说话人识别
- 【课设警告】每个Java老师都喜欢的学生成绩管理系统.zip
- Amzl_Proto
- JSG202227 2022年江苏省职业院校技能大赛(高职) 电子产品芯片级检测维修与数据恢复 赛项规程.zip
- 9cc:小型C编译器
- yamame1212.github.io
- GAN_model:使用GAN生成3D网格模型
- 差异:用于生成字符串差异的简单gem
- Xshell7个人免费版
