
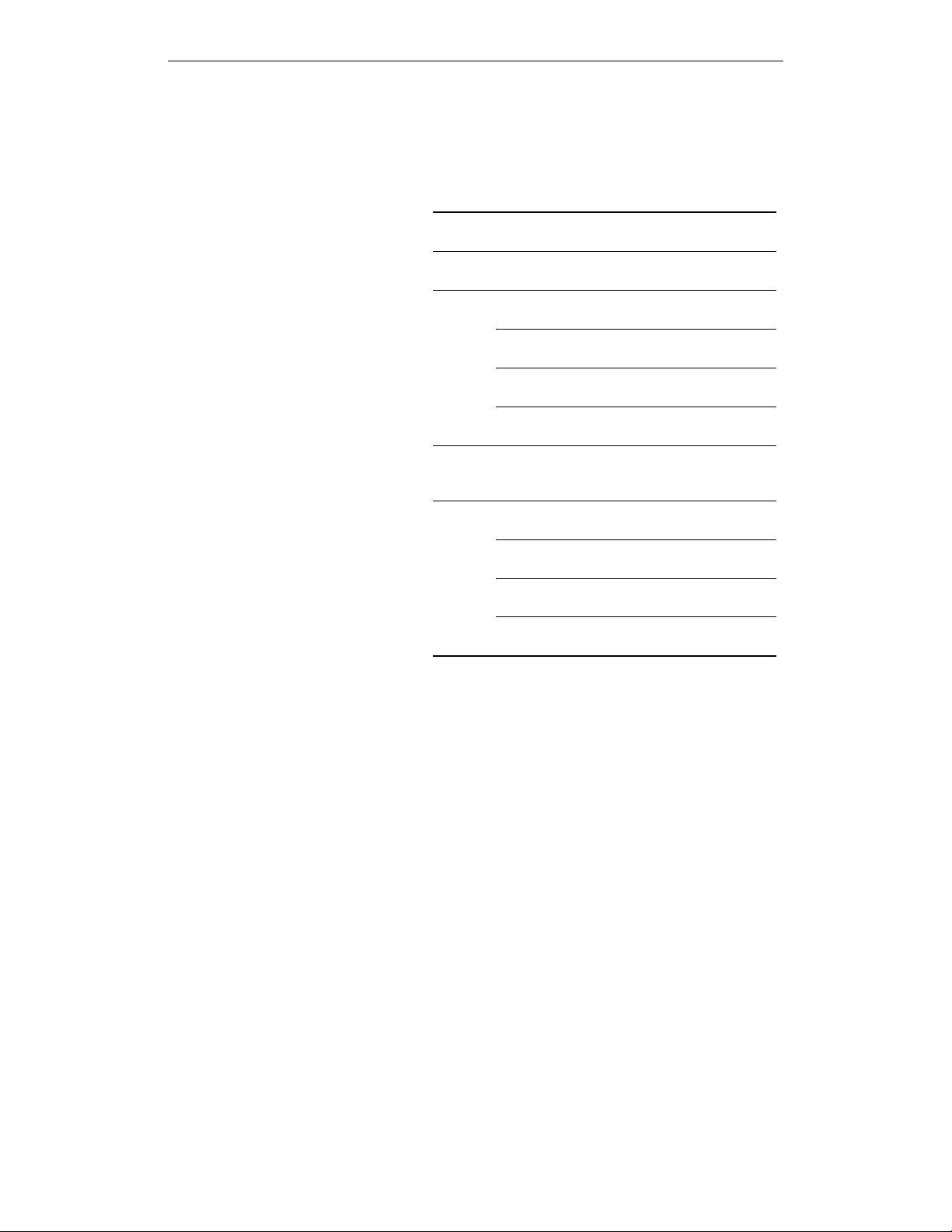
Table 1: MNIST-rot results. Test errors
±
standard deviations
are averaged over six runs. Vanilla CNN is a solely translation
equivariant model (
G = {e}
) with the same general architecture.
See main text for details on the models.
Represen-
tation
Method Stencil Error [%] Params
–
Vanilla
CNN
3 × 3 2.001 ± 0.030
1.1M
5 × 5 1.959 ± 0.055
regular
(our
basis)
Kernels
3 × 3 0.741 ± 0.036 837K
5 × 5 0.683 ± 0.021 1.1M
FD
3 × 3 1.196 ± 0.062 837K
5 × 5 1.54 ± 0.32 941K
RBF-FD
3 × 3 1.313 ± 0.065 837K
5 × 5 1.475 ± 0.020 941K
Gauss
3 × 3 0.795 ± 0.030 837K
5 × 5 0.750 ± 0.017 941K
regular
(PDO-
eConv)
FD
3
5 × 5 1.98 ± 0.11
982K
Gauss 5 × 5 0.831 ± 0.039
quotient
(our
basis)
Kernels
3 × 3 0.717 ± 0.026 877K
5 × 5 0.670 ± 0.011 1.1M
FD
3 × 3 1.143 ± 0.063 877K
5 × 5 1.347 ± 0.026 951K
RBF-FD
3 × 3 1.303 ± 0.077 877K
5 × 5 1.422 ± 0.040 951K
Gauss
3 × 3 0.825 ± 0.053 877K
5 × 5 0.744 ± 0.040 951K
In addition to discretization, the infinite
basis of steerable PDOs or kernels needs
to be restricted to a finite subspace. For
kernels, we use the bandlimiting filters
by Weiler & Cesa (2019). For PDOs,
we restrict the total derivative order to
two for
3 × 3
stencils and to three for
5 × 5
stencils (except for PDO-eConvs,
where we replicate the original basis that
restricts the maximum order of partial
derivatives).
An implementation of steer-
able PDOs and these discretiza-
tion methods can be found at
https://github.com/ejnnr/
steerable_pdos
. The code to run
our specific experiments is available at
https://github.com/ejnnr/
steerable_pdo_experiments.
Finally, steerable PDOs and steerable
kernels only replace the convolutional
layers in a classical CNN. To achieve a
fully equivariant network, all the other
layers, such as nonlinearities or Batch-
norm also need to be equivariant. Weiler
& Cesa (2019) discuss in details how
this can be achieved for various types
of layers and for different group repre-
sentations. In our experiments, we use
exactly the same implementation they
do and only replace the kernel layers with steerable PDOs. Care also needs to be taken with biases in
the PDO layers in order to achieve equivariance. Here, we again follow (Weiler & Cesa, 2019) by
adding a bias only to the trivial irreducible representations that make up ρ
out
.
Rotated MNIST
We first benchmark steerable PDOs on rotated MNIST (Larochelle et al., 2007),
which consists of MNIST images that have been rotated by different angles, with 12k train and
50k test images. Our results can be found in Table 1. The models with
5 × 5
stencils use an
architecture that Weiler & Cesa (2019) used for steerable CNNs, with six
C
16
-equivariant layers
followed by two fully connected layers. The first column gives the representation under which
the six equivariant layers transform (see Appendix B for their definitions). PDO-eConvs implicitly
use regular representations (see Appendix J), but with a slightly different basis than the one we
present, so we test both bases. We also tested models that are
D
16
-equivariant in their first layers and
C
16
-equivariant in their last one but did not find any improvements, see Appendix K. For the models
with
3 × 3
stencils, we use eight instead of six
C
16
-equivariant layers, in order to compensate for the
smaller receptive field and keep the parameter count comparable. The remaining differences between
kernel and PDO parameter counts come from the fact that the basis restrictions necessarily work
slightly differently (via bandlimiting filters or derivative order restriction respectively). All models
were trained with 30 epochs and hyperparameters based on those by Weiler & Cesa (2019), though
we changed the learning rate schedule and regularization slightly because this improved performance
for all models, including kernel-based ones. The training data is augmented with random rotations.
Precise descriptions of the architecture and hyperparameters can be found in Appendix L.
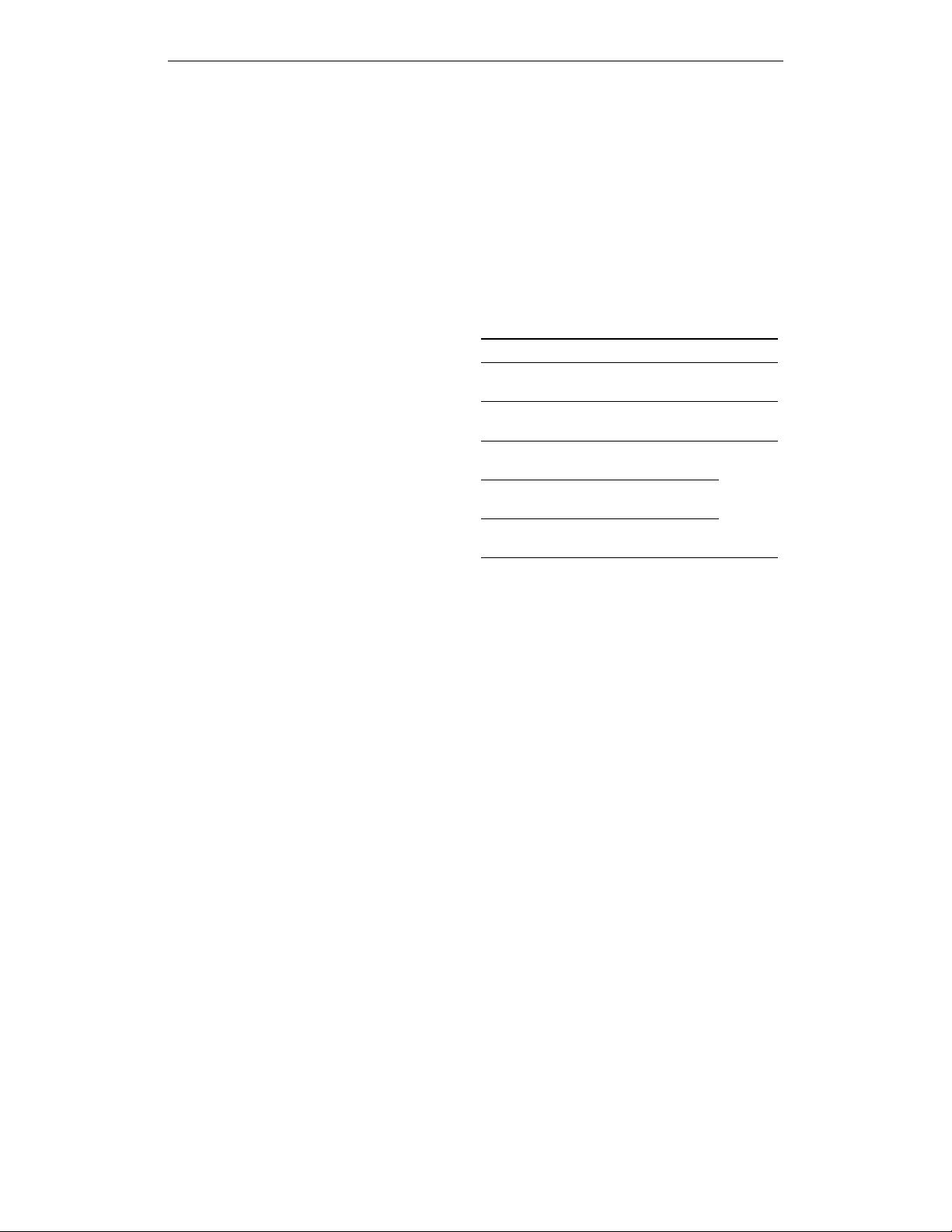
STL-10
The rotated MNIST dataset has global rotational symmetry by design, so it is unsurprising
that equivariant models perform well. But interestingly, rotation equivariance can also help for
natural images without global rotational symmetry (Weiler & Cesa, 2019; Shen et al., 2020). We
therefore benchmark steerable PDOs on STL-10 (Coates et al., 2011), where we only use the labeled
portion of 5000 training images. The results are shown in Table 2. The model architecture and
8
剩余43页未读,继续阅读


易小侠
- 粉丝: 6547
- 资源: 9万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多模态联合稀疏表示在视频目标跟踪中的应用
- Kubernetes资源管控与Gardener开源软件实践解析
- MPI集群监控与负载平衡策略
- 自动化PHP安全漏洞检测:静态代码分析与数据流方法
- 青苔数据CEO程永:技术生态与阿里云开放创新
- 制造业转型: HyperX引领企业上云策略
- 赵维五分享:航空工业电子采购上云实战与运维策略
- 单片机控制的LED点阵显示屏设计及其实现
- 驻云科技李俊涛:AI驱动的云上服务新趋势与挑战
- 6LoWPAN物联网边界路由器:设计与实现
- 猩便利工程师仲小玉:Terraform云资源管理最佳实践与团队协作
- 类差分度改进的互信息特征选择提升文本分类性能
- VERITAS与阿里云合作的混合云转型与数据保护方案
- 云制造中的生产线仿真模型设计与虚拟化研究
- 汪洋在PostgresChina2018分享:高可用 PostgreSQL 工具与架构设计
- 2018 PostgresChina大会:阿里云时空引擎Ganos在PostgreSQL中的创新应用与多模型存储
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


