




51单片机驱动的自动巡线机器人控制系统实现
84 浏览量
更新于2024-09-01
收藏 239KB PDF 举报
"基于51型单片机的自动巡线轮式机器人控制系统设计,包括主控制电路模块、存储器模块、光电检测模块和电机驱动模块等。通过CPLD扩展来减轻单片机CPU负担,实现电机的PWM控制,并利用E2PROM存储器保存机器人运行参数。"
在自动巡线轮式机器人控制系统的设计中,51型单片机扮演了核心角色,确保了系统的稳定性和抗干扰能力。这种类型的机器人通常应用于机器人大赛或智能机器人研究,它们需要具备自主导航的能力,沿着设定的线条路径行驶。
控制系统主要由以下几个模块组成:
1. 主控制电路模块:这是整个系统的指挥中心,通常由51型单片机(如AT89S52)构成。单片机负责处理传感器数据、决策计算以及电机控制。
2. 存储器模块:为了适应不同的比赛环境和任务需求,机器人需要动态调整其运行参数。因此,扩展了E2PROM存储器(如24LC08B),用于存储机器人路径和动作参数,避免频繁擦写单片机内部的Flash。
3. 光电检测模块:通过光电传感器,机器人可以识别地面的线条,实现自动巡线。这些传感器的信号输入到CPLD,由其处理并反馈给主控单片机。
4. 电机及舵机驱动模块:电机是机器人移动的关键,通过PWM(脉宽调制)信号控制电机转速和方向。CPLD扩展用于生成PWM信号,通过调节占空比来控制电机速度,同时提供电机方向控制信号。
在硬件设计中,CPLD(复杂可编程逻辑器件)起到了关键作用。EPM7128 CPLD扩展了单片机的功能,减少了CPU的负载。它提供了PWM信号生成,电机控制,以及行程开关和光电探头的输入信号处理。CPLD的编程使用VHDL语言,能够灵活地定义和修改功能。
通过上述设计,基于51型单片机的自动巡线轮式机器人能够根据预设路径自主移动,同时具备一定的灵活性以适应变化的比赛条件。这样的系统设计对于理解机器人控制原理,以及在实际应用中实现自动化导航具有重要的学习价值。
基于单片机自动巡线轮式机器人控制系统设计基于单片机自动巡线轮式机器人控制系统设计
基于5l型单片机的自动巡线轮式机器人控制系统运行平稳可靠,抗干扰能力强,不仅满足了机器人大赛的设计要
求,同时也为智能机器人搭建了良好的控制平台。
1 引言
轮式移动机器人是机器人研究领域的一项重要内容.它集机械、电子、检测技术与智能控制于一体。在各种移动机构中,轮式
移动机构最为常见。轮式移动机构之所以得到广泛的应用。主要是因为容易控制其移动速度和移动方向。因此.有必要研制一
套完整的轮式机器人系统。并进行相应的运动规划和控制算法研究。笔者设计和开发了基于5l型单片机的自动巡线轮式机器人
控制系统。
2 控制系统总体设计
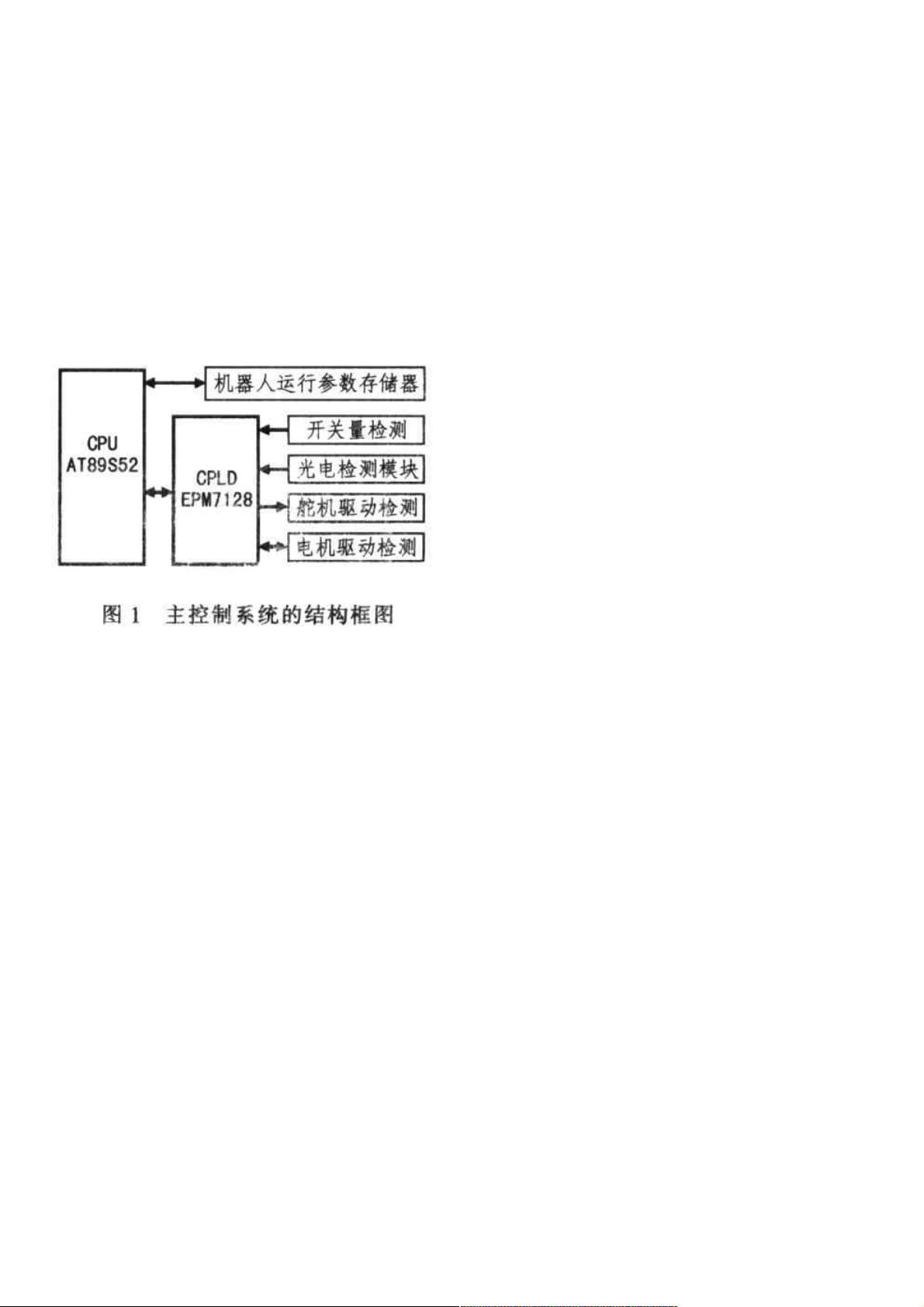
机器人控制系统由主控制电路模块、存储器模块、光电检测模块、电机及舵机驱动模块等部分组成,控制系统的框图如图1所
示。
3 主控制模块设计
3.1 CPLD设计
在机器人控制系统中.需要控制多个电动机和行程开关.还要进行光电检测.如果所有的任务都由AT89S52型单片机来完
成.CPU的负担就会过重。影响系统的处理速度。因此扩展1个CPLD.型号为EPM7128。它属于.MAX7000系列器件。包
括2个通用1/0口.2个专用I/O口,专用I/O口可作为每个宏单元和输入输出引脚的高速控制信号(时钟、清除和输出使能
等),电动机的。PWM信号也由其产生。
EPM7128的引脚排列如图2所示。MlP—M4P引脚的输出为PWM脉宽调制信号,M1FB—M4FB引脚为电机的方向控制信
号,P00一P07接单片机的PO口,100一1015为扩展的2个通用I/O口,SIl—S17引脚为行程开关输入信号,LI11一LI17引脚
为光电探头输入信号。CPLD的编程用VHDL语言,产生1路PWM信号的部分程序源代码如下:
下载后可阅读完整内容,剩余3页未读,立即下载
111 浏览量
186 浏览量
211 浏览量
201 浏览量
181 浏览量
111 浏览量
195 浏览量
186 浏览量
2021-09-25 上传

weixin_38550137
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Cocos程序员指南示例教程
- 64位音频格式互转:AMR与WAV完美整合解决方案
- QTP脚本实例教程:初学者必备指南
- 华视CVR-100D身份证阅读器驱动与SDK开发指南
- 媲美Flash的超酷页面动画效果
- 施工企业官网CSS模板下载与使用指南
- 深入解析zscode-cloud-config-repo的配置管理
- VB实现PLC输出控制的源码示例
- C/C++课程设计:学生成绩管理系统深入探讨
- 未聘人员分流安置情况调查表模板下载
- 李新华高清Oracle教程:视屏辅助,易懂入门口径
- 网页底部固定导航菜单的jQuery实现方法
- 深入解析MSP430单片机实例与综合应用
- PADS9.5自动打地孔方法详解
- GODORI_Server:JavaScript开发的高性能服务器架构
- Eclipse中PowerDesigner插件的使用教程






















